Определим колебательность переходного процесса, как отношение модулей мнимой и вещественной частей корней характеристического полинома.
а перерегулирование:
Вычислим погрешность:
· Расчет длительности переходного процесса:
![]() Под длительностью переходного
процесса будем понимать время, которое прошло от начала процесса до момента,
когда исследуемая величина отличается от установившегося значения не более, чем
на 5%.
Под длительностью переходного
процесса будем понимать время, которое прошло от начала процесса до момента,
когда исследуемая величина отличается от установившегося значения не более, чем
на 5%.
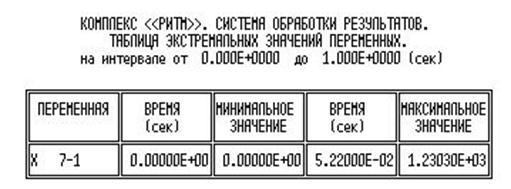
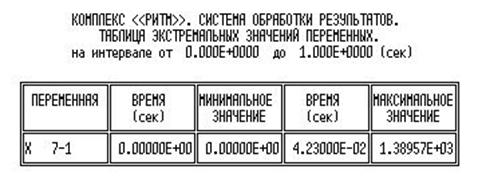
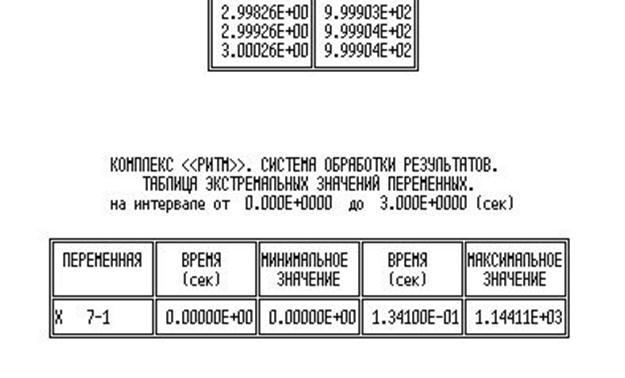
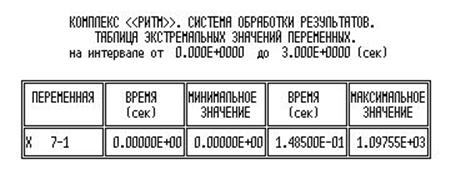
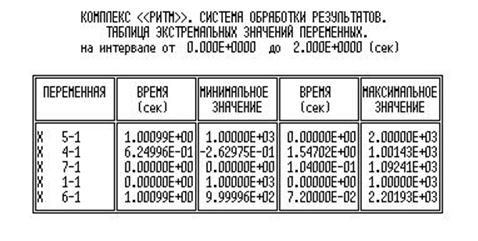
Практические данные берем из табулятора:
![]()
Теоретические:
![]() Длительность переходного
процесса, определяющаяся затуханием экспоненциальной составляющей на 95 %
определяется как 3 постоянных времени
Длительность переходного
процесса, определяющаяся затуханием экспоненциальной составляющей на 95 %
определяется как 3 постоянных времени ![]() :
:
![]()
Определим погрешность:
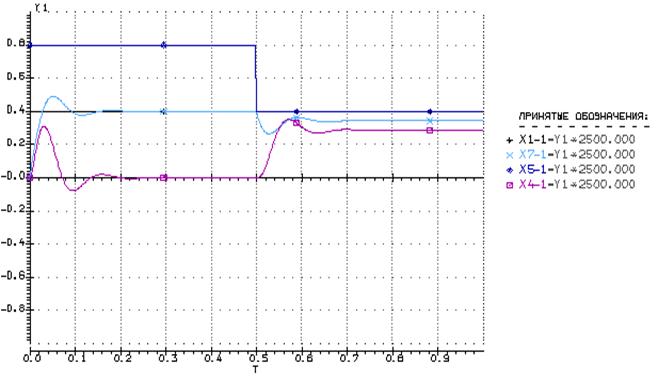
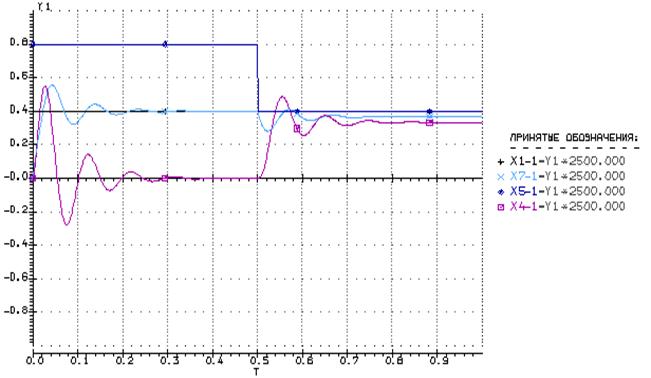
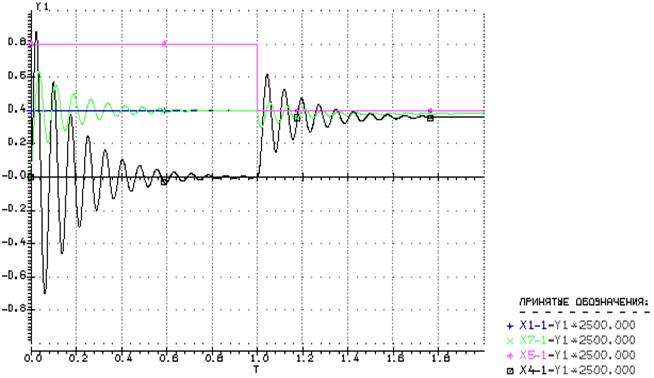
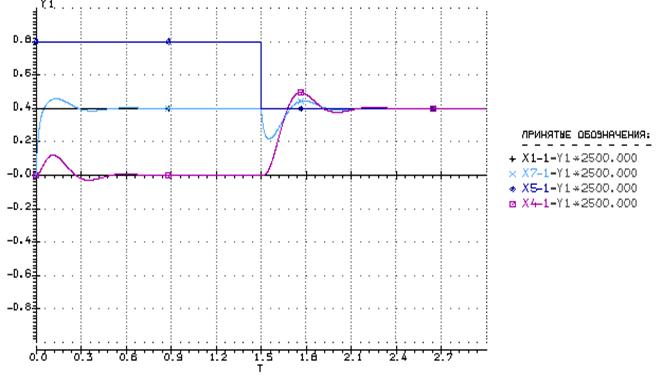
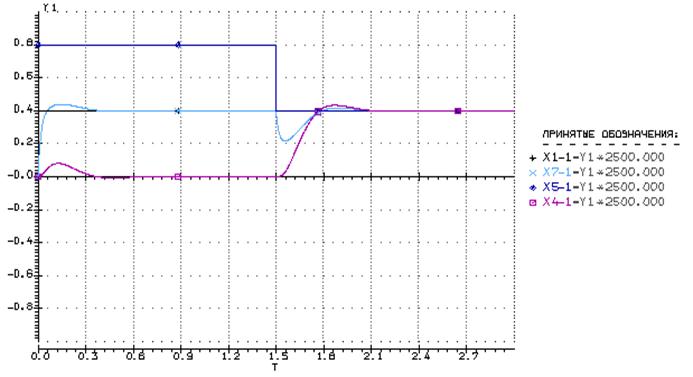
Показатели качества, как предполагалось, не изменились, что можно наблюдать и с осциллограммы.
Пункт 13
Провести поэтапную оптимизацию коэффициентов Кр и Кд с целью обеспечения допустимых значений показателей качества.
Были установлены следующие задание: подобрать коэффициенты Кр и Кд такие, что бы выполнялось условие:
![]()
Или доказать что эти условия не выполнимы данной моделью.
·
Найдем коэффициенты для выполнения условия ![]()
Поскольку в доаварийном режиме нам необходимо, чтобы в
установившемся режиме ![]() , то изменять параметр
датчика мы не можем, Значит, необходимо изменять коэффициент регулятора. Т.о.
фиксируем
, то изменять параметр
датчика мы не можем, Значит, необходимо изменять коэффициент регулятора. Т.о.
фиксируем ![]() ,а значение
,а значение ![]() будем
изменять в пределах области устойчивости.
будем
изменять в пределах области устойчивости.
Возьмем ![]() :
:
Рассчитаем статизм и перерегулирование:
· Перерегулирование:

· Статизм:
Из данных табулятора берем установившиеся значения:
![]()

Возьмем ![]() :
:
Рассчитаем статизм и перерегулирование:
· Перерегулирование:

· Статизм:
Из данных табулятора берем установившееся значение:
![]()

По полученным значениям можно сделать следующие выводы, что при
уменьшении статизма возрастает перерегулирование. Следовательно, требуемых
значений получить не возможно. Для подтверждения, такие коэффициенты датчика,
при которых будет выполнятся ![]() .
.
·
Выполнение ![]()
Построим область с выполнением данного требования.

Нам надо добиться ![]() , следовательно
, следовательно ![]() :
:
Считая, что ![]() :
:
Построим график
![]()
Как видно по графику, точки находящиеся между двумя графиками:
![]()
Возьмем ![]() :
:
Данные из табулятора:

Требование выполнено. Точка настройки ![]()
Рассчитаем перерегулирование

·
Выполнение ![]() :
:
Подберем коэффициенты так, что бы их произведение было больше
2.609, т.е. ![]() .
.
Возьмем ![]()

Требование выполняется. Точка настройки ![]()
Рассчитаем статизм для этой точки:
![]()

Для получения требуемого результата необходимо для фиксированного значения перерегулирования уменьшать статизм. Это можно выполнить, осуществив астатическое управление. Нужно ввести в исходную схему САУ интегрирующее звено таким образом, чтобы в результате получения эквивалентной передаточной функции на предпоследней стадии преобразования это звено вошло в глобальную обратную связь.
Наша модель примет следующий вид:
BLT 103 – генератор кусочно-постоянного сигнала (![]() и
и ![]() )
)
BLT 135 – сумматор
BLT 133 – инерционное звено I-ого порядка (регулятор, исполнительный механизм, нагрузка)
BLT 089 – пропорциональное звено (датчик)
BLT 014 – осциллограф
BLT 015 – табулятор
BLT 132 – интегрирующее звено
Так как мы изменили модель, то изменилась и эквивалентная передаточная
функция, что могло изменить и область устойчивости. Построим заново область
устойчивости относительно коэффициентов регулятора и интегрирующего звена(![]() ).
).
Передаточная функция интегрирующего звена:
Эквивалентная передаточная функция приобретает вид:



![]()
![]()
Для определения области устойчивости используем критерий Гурвица.
Условие устойчивости заключается в требовании положительности определителя Гурвица и всех его диагональных миноров.
Определитель Гурвица:
Найдем предпоследний минор:
Для построения графика нужно решить два уравнения: ![]() и
и ![]()
·
![]()
![]()
·
![]()
![]()
![]()

![]() т.е. границами являются оси.
т.е. границами являются оси.
Поданным построим график трех функций:
Полученный график:
![]() Разделим на области и найдем область
устойчивости из условия
Разделим на области и найдем область
устойчивости из условия ![]() и
и ![]() .
.
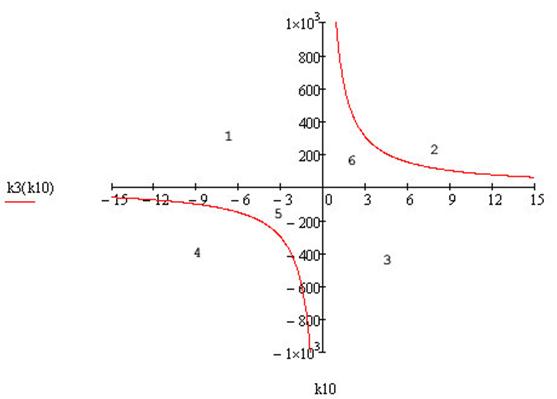
· Рассмотрим первую область.
Возьмем точку ![]() и
и ![]() :
:
Не выполняется условие ![]()
· Рассмотрим вторую область.
Возьмем точку ![]() и
и ![]() :
:
Не выполняется условие ![]()
· Рассмотрим третью область.
Возьмем точку ![]() и
и ![]() :
:
Не выполняется условие ![]()
· Рассмотрим четвертую область.
Возьмем точку ![]() и
и ![]() :
:
Не выполняется условие ![]()
· Рассмотрим пятую область.
Возьмем точку ![]() и
и ![]() :
:

Т.е. это область устойчивости.
· Рассмотрим шестую область.
Возьмем точку ![]() и
и ![]() :
:
Т.е. это область устойчивости.
Исходя из проведенной проверки, получаем, что области, лежащие между осями координат и двумя гиперболами (область 5, область 6), является областями устойчивости.
Так как мы фиксировали значение перерегулирование, то ![]() тогда:
тогда:

Возьмем ![]() :
:
Рассчитаем показатели качества:
· Статизм и перерегулирование:
Экспериментальные:


· Длительность переходного процесса:
Экспериментальное:
t=0.64 c
Теоретическое:
![]()

![]()
Подберем коэффициенты ![]() , так что бы
получить минимальное время переходного процесса.
, так что бы
получить минимальное время переходного процесса.
Возьмем ![]()
Рассчитаем показатели качества:
· Статизм и перерегулирование, время переходного процесса:
Экспериментальные:


t=0.55 c
Теоретические:
· Статизм:

· Перерегулирование:
![]()

· Длительность переходного процесса:

![]()
Все показатели попадают в допуск.
Пункт 14
Предложить и реализовать схемные мероприятия, направленные на повышение точности системы в статических режимах и обеспечения требуемых показателей качества переходных процессов в соответствии с заданием преподавателя.
Необходимо увеличить быстродействие системы в два раза, не допуская
при этом, чтобы напряжение на нагрузке превосходило двукратное значение ЭДС
основного источника ![]() . Для увеличения
быстродействия системы нужно скомпенсировать самую медленную составляющую.
Самой медленной составляющей системы является постоянная времени
исполнительного механизма
. Для увеличения
быстродействия системы нужно скомпенсировать самую медленную составляющую.
Самой медленной составляющей системы является постоянная времени
исполнительного механизма ![]() с. Для ее
компенсации воспользуемся корректирующим идеальным пропорционально-дифференцирующим
звеном с особо подобранной передаточной функцией:
с. Для ее
компенсации воспользуемся корректирующим идеальным пропорционально-дифференцирующим
звеном с особо подобранной передаточной функцией:

Подбираем ![]() и
и ![]() так, чтобы
так, чтобы  .
.
Так как мы уже использовали идеальное интегрирующее звено в астатическом управлении, то можем ввести параллельно ему пропорциональное звено, чтобы получить в качестве корректирующего звена пропорционально-интегрирующее звено.
Тогда структурно-алгоритмическая схема нашей САУ примет следующий вид:
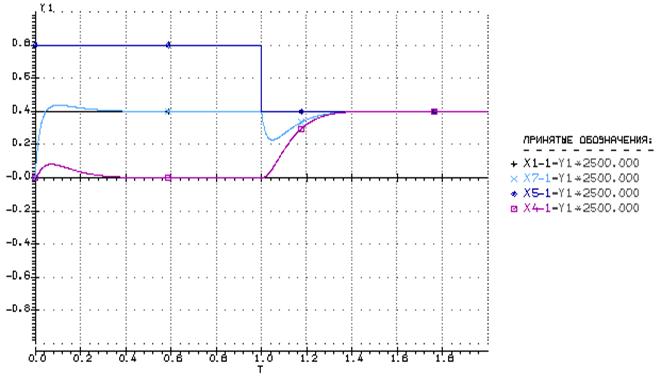
Рассчитаем показатели качества:
· Статизм и перерегулирование, время переходного процесса:
Экспериментальные:


t=0.37 c
Теоретические:
· Статизм:
· Перерегулирование:
![]()
· Длительность переходного процесса:

![]()
Все показатели попадают в допуск.
Максимальное значение напряжения:
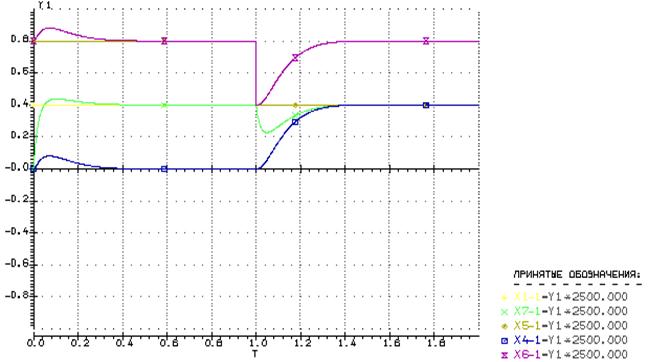
Напряжение на нагрузку, чуть больше чем основного источника. Все требования попадают в допуск.
· Вывод:
в данной курсовой работе были исследованы системы электропитания и способы оптимизации параметров с целью повышения качества регулирования и улучшения характеристик переходных.
В ходе работы мы разработали систему автоматического регулирования, позволяющую при аварии (потеря 50% ЭДС основного источника) свою работоспособность. Для улучшения показателей качества системы использовали астатическое управление и корректирующее звено. Из окончательного графика видно, что после проведения данных мероприятий максимальное напряжение на нагрузке не превышает двукратного значения Е0, а значит изоляция нашей системы выдержит напряжение на нагрузке, таким образом проведенные мероприятия привели к полной работоспособности нашей системы. Так же важно отметить, что цепь вышла слаботочной, что делает возможным применять её на практике.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.