








радиосистемы ближней навигации (РСБН) – дальность до 400-700 км, в зависимости от высоты полета летательного аппарата (ЛА).
в) системы посадки - выдают информацию об отклонении ЛА от заданной траектории на заключительном этапе полета.
2. Степень автономности
а) Автономные системы и устройства измеряют без помощи радиолинии, связывающую бортовую аппаратуру данного объекта с внешними по отношению к нему радиоэлектронными устройствами. Информация извлекается из отраженного сигнала.
б) Неавтономные устройства и системы имеют в своем составе как бортовую аппаратуру, устанавливаемую на объекте, так и связанную с ней радиолинией аппаратуру специальных радиостанций на наземных пунктах, искусственных спутниках Земли (ИСЗ) и т.д.
3. Вид измеряемого элемента
а) угломерные устройства – определяют угол в горизонтальной (азимут) или в вертикальной (угол места) плоскости, или в системе координат связанной с объектом. Подразделяются на радиомаячные и радиопеленгационные:
б) радиомаячные включают в себя радиомаяк, формирующий электромагнитное поле, параметры которого зависят от угловых координат точки приема;
в) радиопеленгационные (радиопеленгаторы) позволяют найти угловые координаты источника излучений электромагнитных колебаний по результатам измерения направления прихода радиоволн.
б) радиодальномерные устройства (радиодальномеры) – предназначены для измерения расстояния от одного объекта до другого.
Многопозиционные радиолокационные станции (МПРЛС)
В общем случае МПРЛС объединяют независимые, бистатические и пассивные РЛС, расположенные в различных точках пространства (позициях).
В независимых РЛС (НРЛС) все элементы аппаратуры располагаются в одной точке, и база такой системы равна нулю.
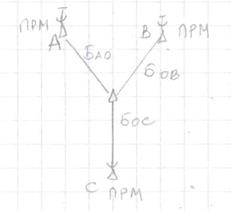
База – это расстояние между позициями РЛС.
Бjk – наименование позиций.
Если Бjk = const, то такие МПРЛС называются МПРЛС с неподвижными базами. Все другие системы составляют группу с подвижными базами.
При разнесении РЛС в пространстве на каждой позиции может размещаться приемная аппаратура (пассивная РЛС), приемная и передающая аппаратура (пассивно-активная МПРЛС) или аппаратура НРЛС (активная МПРЛС).
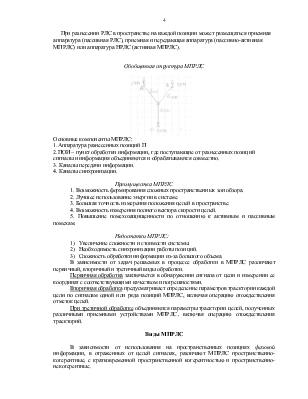
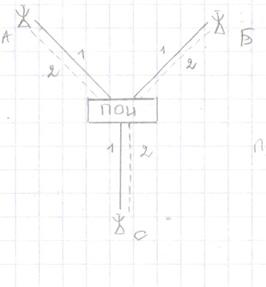
Обобщенная структура МПРЛС
Основные компоненты МПРЛС:
1.Аппаратура разнесенных позиций П
2.ПОИ – пункт обработки информации, где поступающие от разнесенных позиций сигналы и информация объединяются и обрабатываются совместно.
3. Каналы передачи информации.
4. Каналы синхронизации.
Преимущества МПРЛС
1. Возможность формирования сложных пространственных зон обзора.
2. Лучшее использование энергии в системе.
3. Большая точность измерения положения целей в пространстве.
4. Возможность измерения полного вектора скорости целей.
5. Повышение помехозащищенности по отношению к активным и пассивным помехам.
Недостатки МПРЛС:
1) Увеличение сложности и стоимости системы.
2) Необходимость синхронизации работы позиций.
3) Сложность обработки информации из-за большого объема.
В зависимости от задач решаемых в процессе обработки в МПРЛС различают первичный, вторичный и третичный виды обработки.
Первичная обработка заключается в обнаружении сигнала от цели и измерении ее координат с соответствующими качеством и погрешностями.
Вторичная обработка предусматривает определение параметров траектории каждой цели по сигналам одной или ряда позиций МПРЛС, включая операцию отождествления отметок целей.
При третичной обработке объединяются параметры траектории целей, полученных различными приемными устройствами МПРЛС, включая операцию
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.