16
Основные формулы, используемые при управлении ДПТ
ω = (U - IR)/CΦ где U - подводимое к ОЯ напряжение, I - ток ОЯ, R - сопротивление цепи якоря, С - конструктивная постоянная, Ф - поток создаваемый обмоткой возбуждения
Сществует три способа, благодаря которым можно производить регулирование скорости двигателя постоянного тока угловой скорости. Это следует из уравнения электромеханической характеристики.
1) регулирование за счет увеличения величины сопротивления реостата в цепи , 2) регулирование за счет увеличения или уменьшения потока возбуждения двигателя 3) регулирование за счет уменьшение или увеличения подводимого к обмотке якоря двигателя напряжения U.
Ток в цепи якоря I и момент М, который развивает двигатель, зависит только от величины нагрузки на его валу. Давайте рассмотрим один из способов регулирования скорости двигателя постоянного тока в результате изменения сопротивления в цепи якоря. Схема включенного двигателя для данного случая представлена на рис. 1, а механические характеристики — на рис. 2, а.
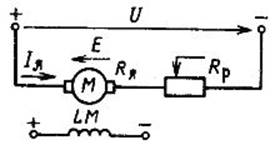 Рис. 1. Схема
включенный двигатель постоянного тока независимого возбуждения
Рис. 1. Схема
включенный двигатель постоянного тока независимого возбуждения
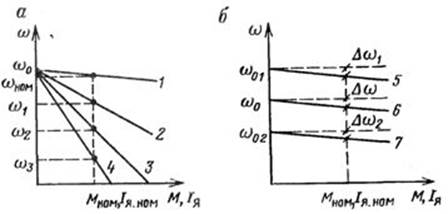
Рис. 2. Механические характеристики двигателей постоянного тока при различных сопротивлениях в цепи якоря (а) и напряжениях (б)
Если мы изменяем сопротивление реостата в цепи якоря можно будет получить при нормальной нагрузке разные угловые скорости электродвигателя на искусственных характеристиках — 1, 2, 3.Провели глубокий анализ этого способа, подразумевающего регулирование скорости двигателя постоянного тока, при помощи основных технико-экономических показателей. При данном способе регулирования изменяется жесткость характеристик в очень широких пределах, то при скоростях меньше половины номинальной стабильность работы двигателя очень резко ухудшается. Благодаря чему диапазон регулирования скорости сильно ограничен (D= 2 - З). Скорость при таком способе становится возможным регулировать в сторону уменьшения от основной стороны.
О чем во многом свидетельствует электромеханические и механические характеристики. Высочайшую плавность регулирования очень трудно обеспечить, потому что потребовалось бы большое количество ступеней регулирования и конечно большое число контакторов. Целое использование двигателя по току (нагреву) в таком случае достигается при регулировании с одним и тем же моментом нагрузки. Минусом рассматриваемого нами способа является наличие больших потерь мощности при регулировании, которые естественно пропорциональны относительным изменениям угловой скорости. Плюсом рассмотренного нами способа регулирования угловой скорости являются простая и надежная схема управления. Если учитывать немалые потери в реостате при маленьких скоростях, этот способ регулирования скорости применим для приводов с кратковременным и повторно-кратковременным режимом работы. left0Если рассматривать второй способ регулировки угловой скорости двигателя постоянного тока. Он осуществляется увеличением величины магнитного потока за счет введения в цепь обмотки возбуждения другого реостата.
При уменьшении потока угловой скорости двигателя, так же как и нагрузке, так и при простом ходе увеличивается, а при увеличение потока — уменьшается. На практике возможно увеличение или уменьшение скорости только в сторону увеличения в виде насыщения двигателя. При повышении скорости путем ослабления потока допустимый момент двигателя постоянного тока меняется по закону гиперболы, а мощность остается неизменной. Диапазон, для которого необходимо регулирование скорости двигателя постоянного тока для данного способа D = 2 - 4. Механические характеристики для разный значений потока показаны на рис. 2, а и 2, б, из которых следует, что характеристика в пределах номинального тока имеет высокую степень жесткости
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.

