Санкт-Петербургский Государственный Университет Информационных Технологий, Механики и Оптики
Кафедра Систем Управления и Информатики
Расчетная работа
по курсу "Специальные разделы теории управления"
Вариант №20
|
Выполнил: |
Студент гр. 4145 Годгильдиев А.М. |
|
Преподаватель: |
Кремлев А.С. |
Санкт-Петербург
2007 г.
Цель работы: для заданного ОУ спроектировать пропорциональный регулятор, обеспечивающий в замкнутой системе требуемое время переходного процесса и значение перерегулирования.
Исходные данные:
1.Расчет ОУ ВСВ в дискретной форме.

Представим ОУ в канонической управляемой форме:
![]()

Дискретизируем систему при T=0.003c.
2. Передаточная функция ОУ.
3. Переходная функция ОУ.
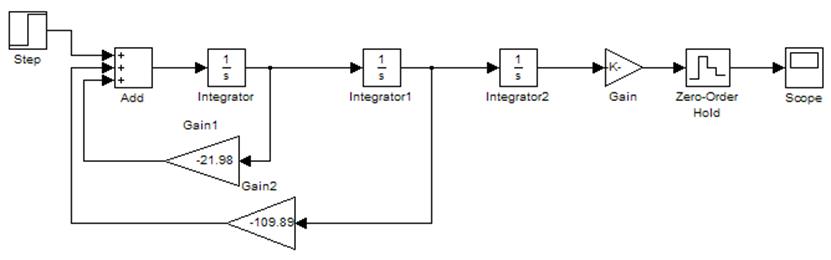
Схема моделирования:
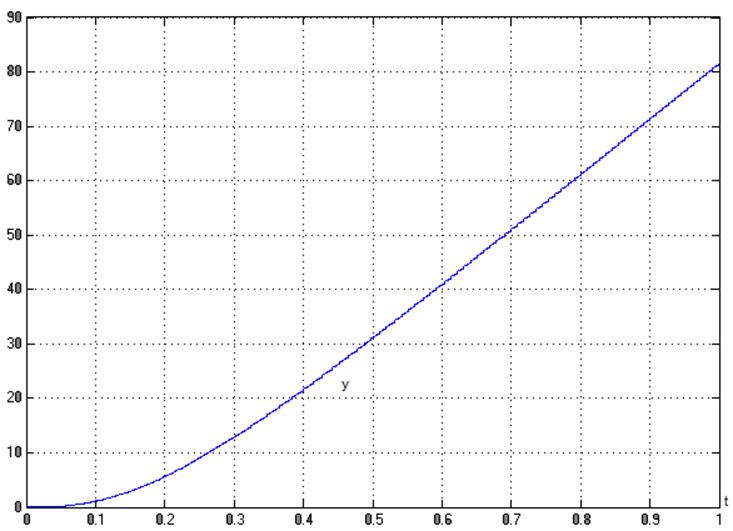
Переходная функция:
4. Расчет регулятора.
1. Проверим ОУ на полную управляемость.
ОУ полностью управляем.
2. Построим эталонную модель на основе стандартного полинома Баттерворта 3-го порядка.
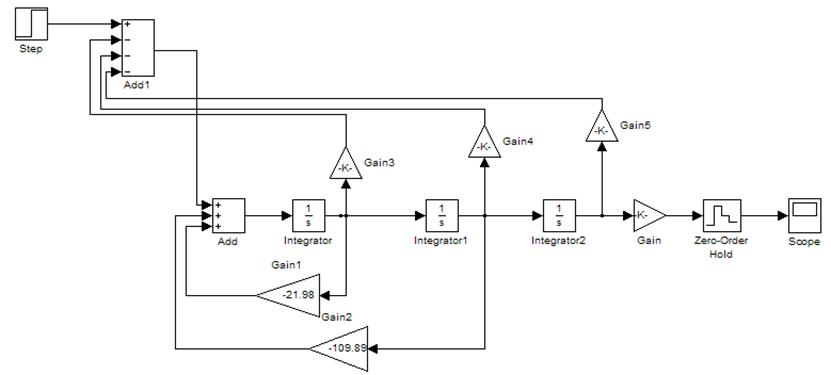
5. Схема моделирования замкнутой системы.
6. Переходная функция замкнутой системы.
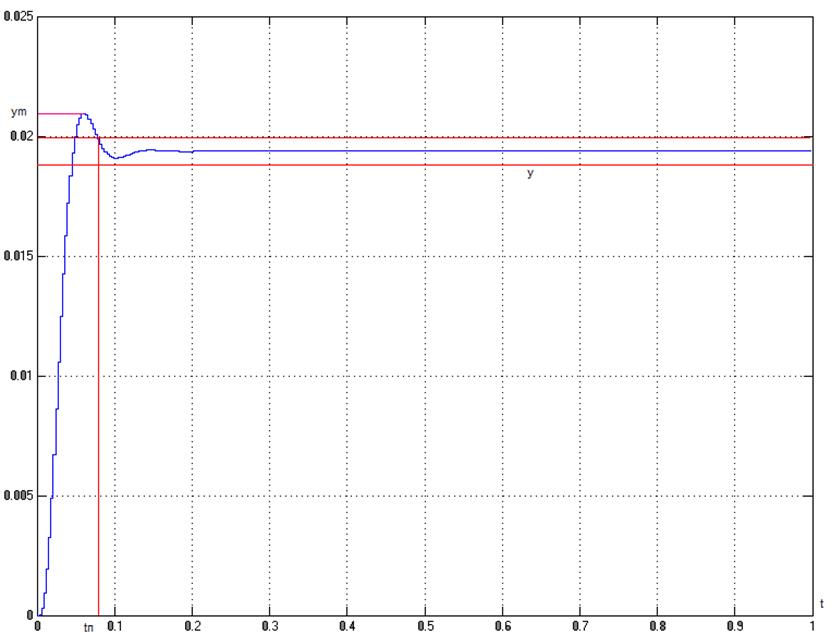
По графику определим:
Очевидно, что замкнутая система удовлетворяет требуемым показателям качества.
Вывод: в ходе работы был построен пропорциональный регулятор, обеспечивающий требуемые динамические качества в замкнутой дискретной системе. Методы синтеза регулятора в дискретных системах практически идентичны методам синтеза регулятора в непрерывных системах.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.

