![]() .
(7)
.
(7)
The consistent estimate of time-invariant
matrix ![]() is given by
is given by
 .
(8)
.
(8)
So, the expressions (3), (5-8) determine
the identification algorithm of noise covariances ![]() and
and
![]() in conditions of time-varying
state-transition matrix and time-varying input matrix.
in conditions of time-varying
state-transition matrix and time-varying input matrix.
To estimate the accuracy and convergence
rate of the proposed algorithm, statistical modeling was used for the
non-stationary model with determinate polynomial base disturbed by zero-mean
uncorrelated random acceleration![]() with unknown variance
with unknown variance![]() . Coordinate
. Coordinate ![]() and its rate are the components of the state vector
and its rate are the components of the state vector ![]() for the model (1). The state-transition matrix
for the model (1). The state-transition matrix
 ; input matrix
; input matrix  .
.
It is supposed that the coordinate x and
its rate are measured in presence of additive uncorrelated zero-mean noise ![]() with unknown covariance
with unknown covariance  . Then matrix
. Then matrix ![]() in
the equation (2) is unitary matrix. It is supposed also that time interval
between measurements is variable because of possible measurements omission,
which probability is determined by
in
the equation (2) is unitary matrix. It is supposed also that time interval
between measurements is variable because of possible measurements omission,
which probability is determined by![]() . So the
matrixes
. So the
matrixes ![]() and
and ![]() are
time-varying.
are
time-varying.
The Figure 1 depicts the behavior of mean
square errors of estimations![]() ,
, ![]() and
and ![]() obtained
on the basis of statistical averaging of 100 realizations of trajectory. The
minimal time interval between measurements
obtained
on the basis of statistical averaging of 100 realizations of trajectory. The
minimal time interval between measurements ![]() can
increase in accordance with number of missed measurements (
can
increase in accordance with number of missed measurements (![]() ). The true values of estimating variances
). The true values of estimating variances ![]() ,
,![]() ,
,![]() . As figure shows, the accuracy of
estimation of unknown variances increases during the all observation period
. As figure shows, the accuracy of
estimation of unknown variances increases during the all observation period ![]() . Errors of estimation of
. Errors of estimation of ![]() (Figure 1.a, solid curve) are
approximately three times greater than those of
(Figure 1.a, solid curve) are
approximately three times greater than those of![]() (Figure
1a, dash curve). A priory information about covariance
(Figure
1a, dash curve). A priory information about covariance ![]() lets us to increase the accuracy of
estimation of
lets us to increase the accuracy of
estimation of ![]() (Figure 1b, dash curve)
(Figure 1b, dash curve)
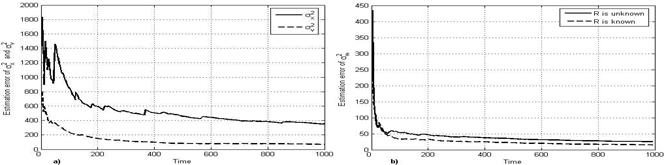
Figure 1. The behavior
of mean square errors of estimations: a) ![]() ,
,
![]() ; b)
; b)![]() .
.
in comparison with this estimation in
conditions of unknown covariance ![]() (Figure 1.b,
solid curve).
(Figure 1.b,
solid curve).
3. IDENTIFICATION OF NOISE STATISTICS ON THE BASIS OF FILTER RESIDUALS
Let us consider the non-stationary one-dimensional model of random walk described by the following set of difference equations
![]()
![]()
in which ![]() and
and ![]() are uncorrelated zero-mean noise
sequences with unknown variances
are uncorrelated zero-mean noise
sequences with unknown variances ![]() and
and ![]() .
.
Let us create the 2 and 1-dependent sequence
of pseudo-measurements ![]() и
и ![]() of variances
of variances ![]() and
and ![]() in conditions when
in conditions when ![]() . Filtered estimate of state
. Filtered estimate of state ![]() on the basis of filter with memory 1
and extrapolated one for next step are giving by
on the basis of filter with memory 1
and extrapolated one for next step are giving by ![]() . The filter residual
. The filter residual ![]() . The state estimation of
. The state estimation of ![]() built for the model of free dynamical
system on the basis of filter with memory 2 is giving by
built for the model of free dynamical
system on the basis of filter with memory 2 is giving by  , and corresponding residual is determined
by
, and corresponding residual is determined
by  . For every
. For every ![]() let us determine analogically the 2-depentent
sequence of residuals product
let us determine analogically the 2-depentent
sequence of residuals product ![]() on the basis of filter with fixed memory 1 and 2.
on the basis of filter with fixed memory 1 and 2.
As ![]() and
and  , then
, then
 . So, the expression
. So, the expression
 (9)
(9)
can be considered as pseudo-measurements of variance ![]() .
.
As ![]() , then the pseudo-measurements of
, then the pseudo-measurements of ![]() are giving by
are giving by
 (10)
(10)
The estimations of time-invariant variances
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.