Let us consider procedure of the
fuzzy neural network design on an example of the "beacons-gate" task.
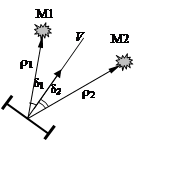
The gate is formed by two active beacons M1 and M2 (Fig. 1). Obviously this
task is similar to the task of a motion direct to a beacon, but the robot must
move along a straight line between the beacons.
Fig. 1. Pass of the gate
There are initial positions for which the motion trajectory will pass very near from one of beacons and the robot can bring down the beacon. To prevent this collision the robot has to rotate around of the nearest beacon initially and then pass in the gate.
From analysis of all possible situations, the eight fuzzy rules was designed for the "beacons-gate" task [4]:
![]()
![]()
![]()
![]()
![]()
![]()
![]()

g1, g2 – angles towards the first beacon and to the second beacon accordingly, r1, r2 – distances to the first beacon and the second beacon accordingly, K – number of the active beacons, DV equals to zero when the robot has to move along a straight line and the DV does not equals to zero when the desired motion is an arc.
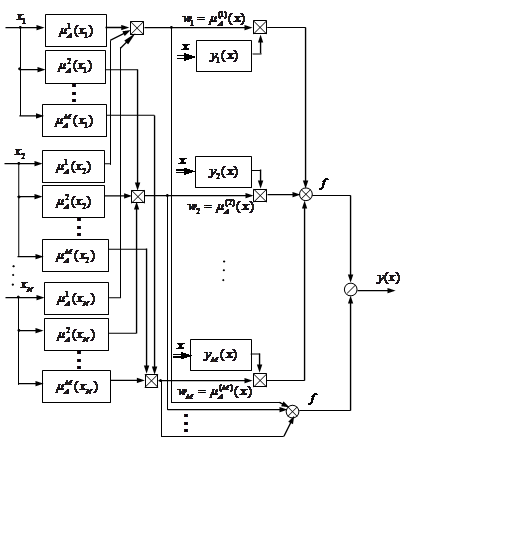 |
Fig. 2. The TSK fuzzy neural network structure
The network presented in figure 2 has one
output neural. The full structure of the fuzzy neural network consists of the
two independent similar networks. The output of the first network defines a
desirable value of the parameter d. In the second network, the output defines
a desirable value of the parameter![]() . The TSK fuzzy network contains two parametrical layers (the first
layer and the third layer), their parameters are determined at training. The
parameters of the first layer are unknown coefficients of a membership function
(nonlinear parameters
. The TSK fuzzy network contains two parametrical layers (the first
layer and the third layer), their parameters are determined at training. The
parameters of the first layer are unknown coefficients of a membership function
(nonlinear parameters ![]() ); the parameters of the third layer are called linear
weights
); the parameters of the third layer are called linear
weights ![]() . In the example "beacons-gate" the eight
fuzzy rules and the three input variables are used. The total number of the
network parameters is 104, from which 32 are linear weights, the others 72 are
parameters of the nonlinear part of the conditions.
. In the example "beacons-gate" the eight
fuzzy rules and the three input variables are used. The total number of the
network parameters is 104, from which 32 are linear weights, the others 72 are
parameters of the nonlinear part of the conditions.
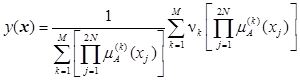
In Wang-Mendel fuzzy neural network Mamdany-Zadeh conclusion model is used with the defuzzification in relation to the average center [5]
 , (5)
, (5)
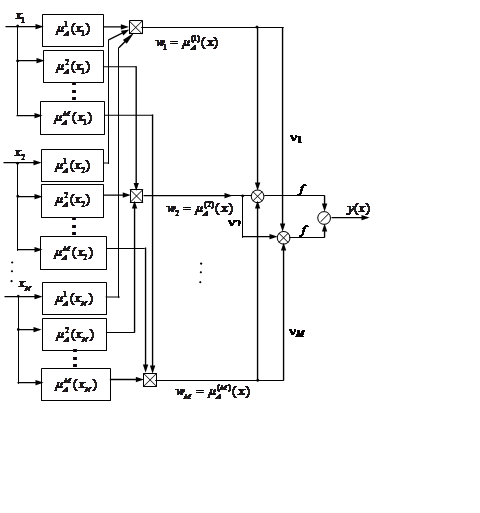 |
Fig. 3. The Wang-Mendel fuzzy neural network structure
This network contains four layers. The first layer and
the third layer are parametrical. The unknown parameters of the first layer are
the membership function coefficients (![]() ), the unknown parameters of the third layer are the weights
), the unknown parameters of the third layer are the weights![]() .
.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.