Abstract – The report consists of two parts. The first part includes calibration method and simulation results of dynamic fuel control by means of multimode neural dynamic fuel corrector that is based on neural mass fuel film observer. The second part includes calibration method, practical realization method in standard electronic control unit and motor-test results of multimode dynamic fuel corrector based on standard mass fuel film observer with neural coefficients.
In order to achieve future exhaust regulations, a precise control of air fuel ratio has to be guaranteed in transient conditions. In a modern pollutant control system a three way catalyst (TWC) is used, which requires a very narrow band of the air/fuel ratio to operate properly. And there are many factors that influence to air fuel ratio fluctuation in spark ignition (SI) engine [1]. Control of air fuel ratio on static regimes is not so difficult problem in contrast to dynamic control of fuel delivery in cylinder.
Mostly modern electronic control system has separate algorithm of dynamic fuel corrector (DFC) for correcting air fuel ratio on dynamic operation engine regimes, for example, when driver kicks down gas pedal. In most cases DFC is based on model mass fuel film observer and it has several coefficients, which are mostly distributed as for operation engine regimes. The procedure of coefficients optimization is a very difficult task, which is realized, in most cases, manually only on limited set of dynamic regimes, and it takes much time. But onstream, engine works for great deal of dynamic regimes quantity, and it is a very difficult task to bring all typical dynamic regimes to the adequate limited set of regimes by means of standard classification procedures.
To solve above said disadvantages of the standard DFC, it is possible to apply neural based approaches because of neural network (NN) capability for pattern-recognition, classification, generalization, self-instruction, optimization, model and control [2].
In relation to DFC it is possible to apply three principle approaches which are based on neural network. The first approach: approximation of the standard DFC coefficients represented in look-up tables by means of radial basis neural network. In this case it is necessary to find coefficients values on basic dynamic operation engine regimes and after that to approximate the obtained coefficients values. The second approach: replacement look-up tables coefficients of standard DFC by neural network, for example, feed-forward neural network. In this case global optimization has to be realized in the area N+1 variables, for example, by means of Genetic Algorithm (GA) (wherein N is quantity of neural network parameters, (N+1) dimension is an integral error of air fuel ratio deviation from stoichiometric value). The third approach: direct application of neural network as DFC, for example, feed-forward neural network. In this case, it is possible to apply the powerful learning rule for neural network - backpropagation error method, and to optimize directly fuel quantity from output of DFC based on liner L-sensor signal.
This report includes examples for realization of two neural approaches: neural multimode DFC with neural observer and standard multimode DFC with neural coefficients.
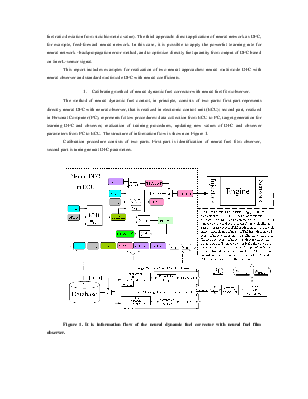
The method of neural dynamic fuel control, in principle, consists of two parts: first part represents directly neural DFC with neural observer, that is realized in electronic control unit (ECU); second part, realized in Personal Computer (PC), represents follow procedures: data collection from ECU to PC, target generation for learning DFC and observer, realization of training procedures, updating new values of DFC and observer parameters from PC to ECU. The structure of information flow is shown on Figure 1.
Calibration procedure consists of two parts. First part is identification of neural fuel film observer, second part is tuning neural DFC parameters.
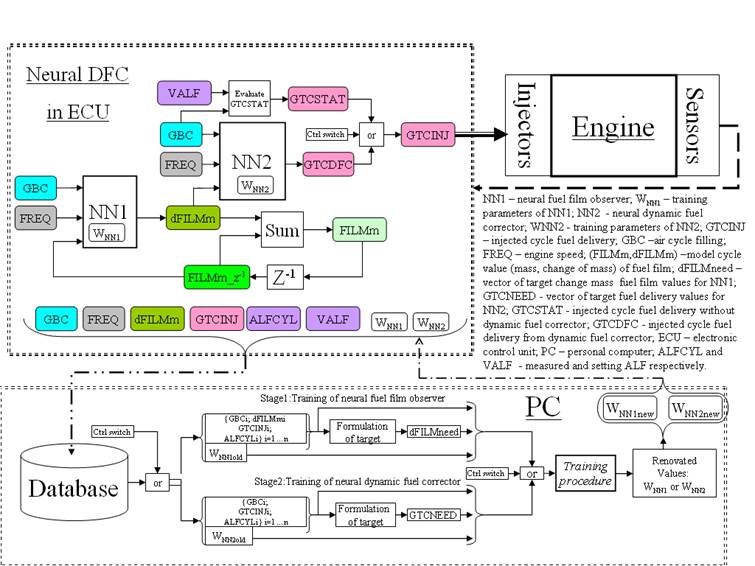
Figure 1. It is information flow of the neural dynamic fuel corrector with neural fuel film observer.
The decrease of maximum deviation air fuel ratio from stoichiometric value on train, test and validation data set depending on number of engine call is shown on Figure 2.
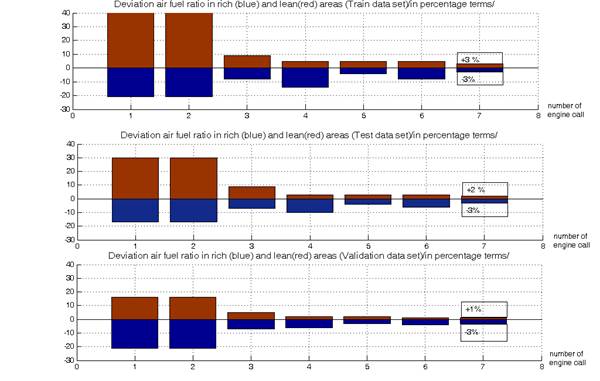
Figure 2. It is maximum deviation of the air fuel ratio in lean (red color) and rich (blue color) areas (in percentage terms) depending on engine call quantity at training, testing and validation data sets accordingly.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.