Санкт-Петербургский Государственный Университет Информационных Технологий Механики и Оптики
Кафедра Систем Управления и Информатики
Лабораторная работа №7
«Точная линеаризация и попятный синтез»
Выполнил: Годгильдиев А,
Пронин В.
группа 4145
Проверил: Пыркин А.А
Санкт-Петербург
2008
1 Точная линеаризация и стабилизация выхода
а) 
![]()
Найдём линеаризующее управление. В
общем виде  , что при подстановке в
, что при подстановке в ![]() даст
даст ![]() .
Найдём решение относительно k, обеспечивающее t=1 c. Стандартный полином Баттерворта
первой степени выглядит как
.
Найдём решение относительно k, обеспечивающее t=1 c. Стандартный полином Баттерворта
первой степени выглядит как ![]() =0, а t*=3
c. Откуда
=0, а t*=3
c. Откуда ![]() =3, а значит k=3. То есть управление в нашем случае будет равно
=3, а значит k=3. То есть управление в нашем случае будет равно  .
.
б) 
![]()
Найдём линеаризующее управление. В
общем виде , что при подстановке в ![]() даст
даст ![]() .
Найдём решение относительно к, обеспечивающее t=1 c. Стандартный полином Баттерворта первой степени выглядит
как
.
Найдём решение относительно к, обеспечивающее t=1 c. Стандартный полином Баттерворта первой степени выглядит
как ![]() =0, а t*=3 c. Откуда
=0, а t*=3 c. Откуда ![]() =3, а значит k=3. То есть управление в нашем случае будет равно
=3, а значит k=3. То есть управление в нашем случае будет равно  .
.
При реализации данного управления получим следующие переходные процессы и фазовые портреты.
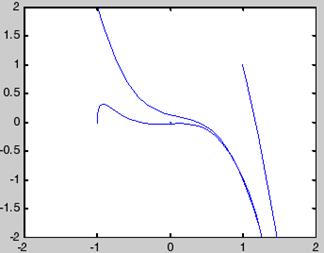
1) ![]()
![]()
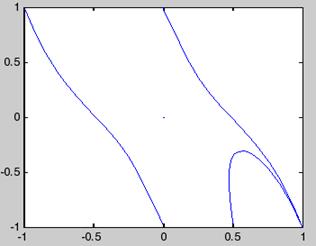
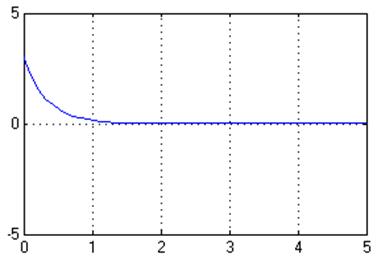
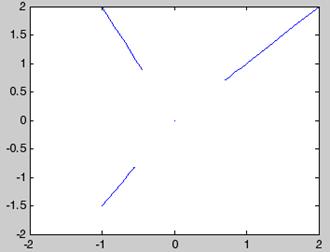
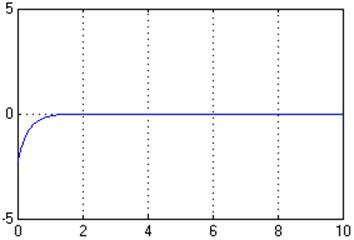
Переходный процесс Фазовый портрет
Система обеспечивает сходимость к y=0 за 1 секунду, но она не является полной, а значит и устойчивой, так как неустойчивая нулевая динамика ведёт к бесконечному возрастанию переменных состояния.
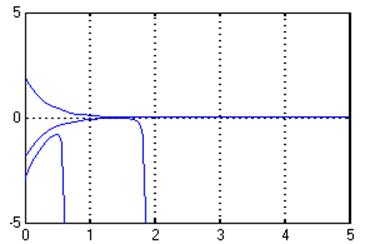
2) ![]()
![]()
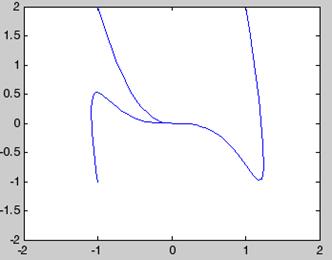
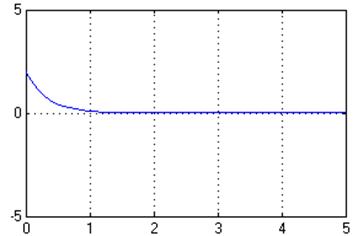
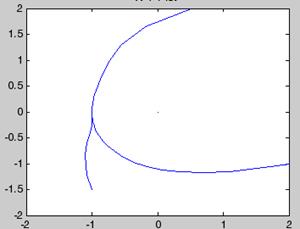
Переходный процесс Фазовый портрет
Нулевая динамика устойчива, система полная и устойчивая, заданное время переходного процесса 1с обеспечивается.
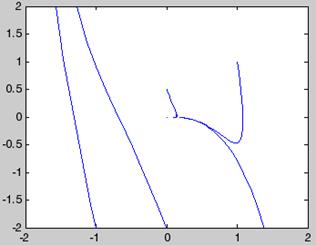
3) ![]()
![]()
Переходный процесс Фазовый портрет
Система полная, устойчивая по выходу, со временем переходного процесса 1с, но не обладающая устойчивой нулевой динамикой.
4) ![]()
![]()
Переходный процесс Фазовый портрет
Данная система не является полной, а как следствие и устойчивой по выходу, а так же не обладает устойчивой нулевой динамикой.
в) 
для случаев когда ![]()
 , где
, где ![]() ,
, ![]()
![]()
Найдём линеаризующее управление. В общем виде , что при подстановке в ![]() даст
даст ![]() .
Найдём решение относительно к, обеспечивающее t=1c. Стандартный полином Баттерворта первой степени выглядит
как
.
Найдём решение относительно к, обеспечивающее t=1c. Стандартный полином Баттерворта первой степени выглядит
как ![]() =0, а t*=3c. Откуда
=0, а t*=3c. Откуда ![]() =3, а значит k=3. То есть управление в нашем случае будет равно
=3, а значит k=3. То есть управление в нашем случае будет равно  .
.
1) ![]()
Переходный процесс Фазовый портрет
Система полная, устойчивая по выходу, обладает устойчивой нулевой динамикой.
2) ![]()
Переходный процесс Фазовый портрет
Система полная, устойчивая по выходу, обладает устойчивой нулевой динамикой.
3) ![]()
Переходный процесс Фазовый портрет
Система полная, устойчивая по выходу, обладает устойчивой нулевой динамикой.
2 Попятный синтез и стабилизация каскадных систем
Исходные данные:
1. Найдем виртуальное управление ![]() ,
обеспечивающее стабилизацию подсистемы
,
обеспечивающее стабилизацию подсистемы ![]() и
время переходного процесса
и
время переходного процесса ![]() :
:
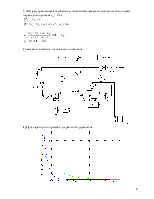
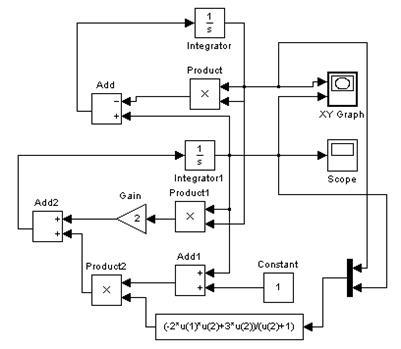
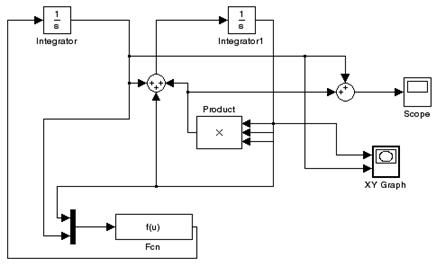
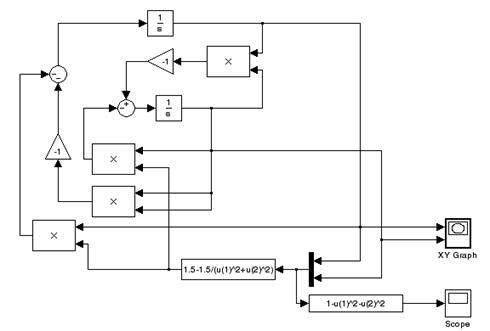
Схема моделирования:
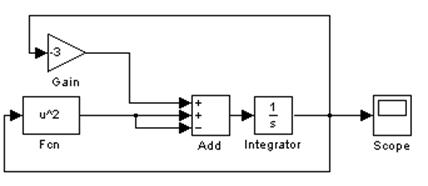
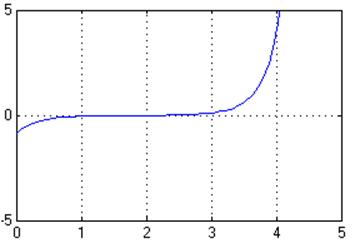
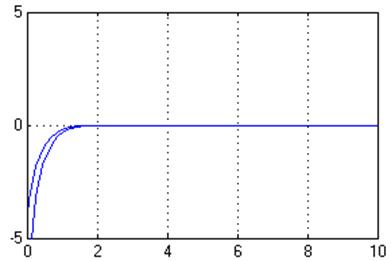
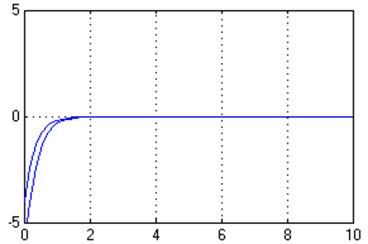
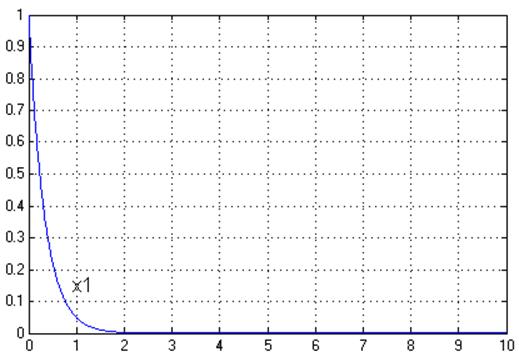
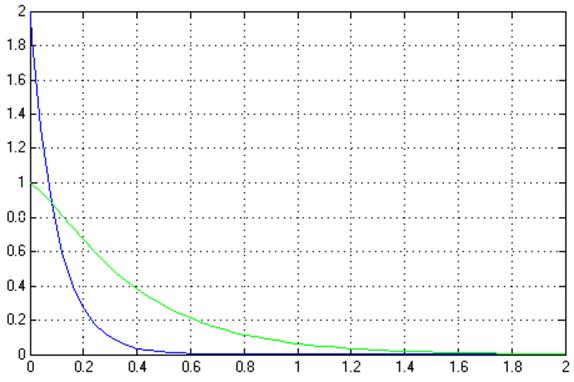
График переходного процесса:
2.Ошибка![]() .
.
Преобразованная система в координатах ![]() будет иметь вид:
будет иметь вид:

3. Найдем управляющее воздействие u, обеспечивающее
стабилизацию ошибки и время переходного процесса ![]() :
:
Схема моделирования для реального управления:
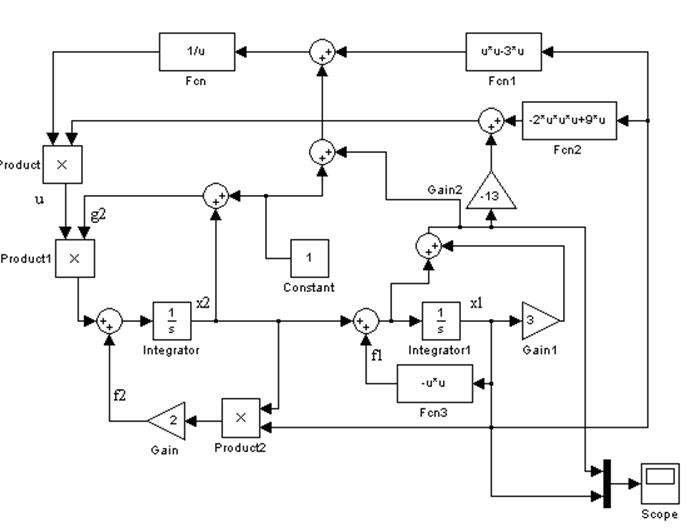
График переходного процесса для реального управления:
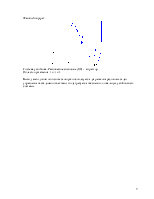
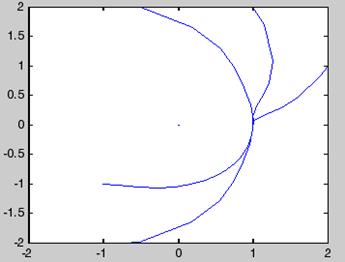
Фазовый портрет:
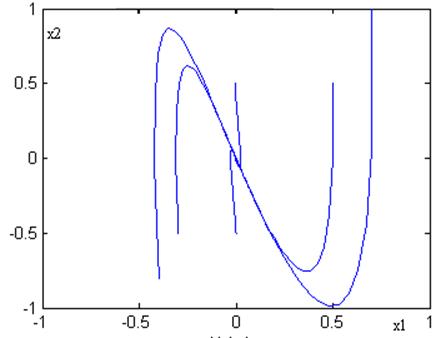
Система устойчива. Равновесное состояние (0,0) - аттрактор.
Область притяжения ![]() .
.
Вывод: метод попятного синтеза широко используется для решения различных задач управления каскадными объектами, когда требуется обеспечить глобальную устойчивость системы.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.