Санкт-Петербургский Государственный Университет Информационных Технологий Механики и Оптики
Кафедра Систем Управления и Информатики
Лабораторная работа №3
«Релейные системы»
Выполнил: Годгильдиев А,
Пронин В.
группа 4145
Проверил: Пыркин А.А
Санкт-Петербург
2008
Цель работы: Рассмотреть нелинейные системы 2-го порядка, содержащие объект управления и релейный регулятор.
Объект управления:
![]() , x1(0)=x10
, x1(0)=x10
![]() , x2(0)=x20
, x2(0)=x20
Регулятор: u = f2(x1, x2)
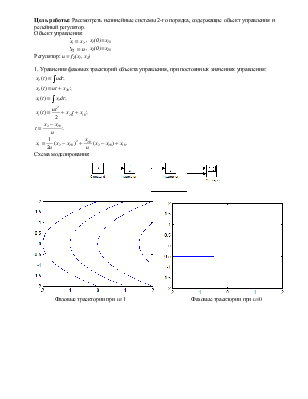
1. Уравнения фазовых траекторий объекта управления, при постоянных значениях управления:
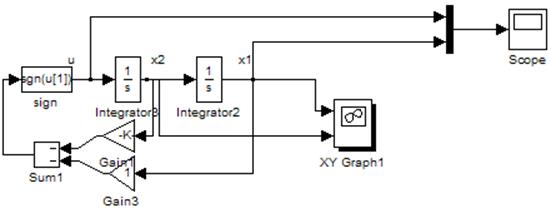
Схема моделирования:
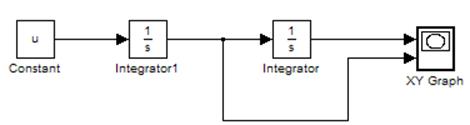
![]()
![]()
Фазовые траектории при u=-1
2. Метод припасовывания
f2(x1, x2)= - sign (k1 x1 + k2 x2);
k1=1; k2=0,25.
k1x1 + k2 x2=0 – линия переключения
k1 x1 + k2 x2<0 – R+
k1 x1 + k2 x2>0 – R-
Схема моделирования:
 Фазовый
портрет при k2=0,25
Фазовый портрет при k2=0
Фазовый
портрет при k2=0,25
Фазовый портрет при k2=0
 Фазовый портрет
при k2=0, 5
Фазовый портрет при k2=1
Фазовый портрет
при k2=0, 5
Фазовый портрет при k2=1
Графики переходных процессов х1(t) и u(t) при k2=0,25
Графики переходных процессов х1(t) и u(t) при k2=0
Графики переходных процессов х1(t) и u(t) при k2=0,5
 Графики переходных процессов х1(t) и u(t) при
k2=1
Графики переходных процессов х1(t) и u(t) при
k2=1
3. релейная система c зоной нечувствительности, d=0.2
![]() .
.
Так как функция ![]() принимает три
постоянных значения -1, 0, 1, то на интервалах знакопостоянства система
линейна.
принимает три
постоянных значения -1, 0, 1, то на интервалах знакопостоянства система
линейна.
Области знакопостоянства:
![]()
![]()
![]()
![]() - зона нечувствительности
- зона нечувствительности
![]()
![]() ,
,
Линии переключения (![]() ):
):
![]()
![]() ,
,
![]()
![]() ,
,
Фазовый портрет при k1=1, k2=0,25
![]() .
.
Так как функция ![]() принимает два
постоянных значения -1 и 1, то на интервалах знакопостоянства система линейна.
принимает два
постоянных значения -1 и 1, то на интервалах знакопостоянства система линейна.
Области знакопостоянства:
![]() , при
, при ![]() ,
,
![]() , при
, при ![]() .
.
Линии переключения (![]() ):
):
![]()
![]() при
при ![]() ,
,
![]()
![]() при
при ![]() ,
,
Фазовый портрет при k1=1, k2=0,25
Вывод: в данной работе были рассмотрены нелинейные системы 2-го порядка, содержащие объект управления и релейный регулятор, с помощью метода припасовывания построены их фазовые портреты.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.