Санкт-Петербургский Государственный Университет
Информационных Технологий Механики и Оптики
Кафедра Систем Управления и Информатики
Нелинейные и оптимальные системы
Лабораторная работа № 6
"Преобразование координат и эквивалентные модели. Преобразование к нормальной форме."
|
Выполнили: |
студенты группы 4145 Годгильдиев А. Пронин В. |
|
Проверил: |
Пыркин А.А. |
Санкт-Петербург
2008 г.
1. Преобразование координат и эквивалентные модели.
Цель работы:проверить эквивалентность систем, полученных при заданном преобразовании координат, исследовать основные свойства эквивалентных систем.
Исследование:
1.1
Преобразование
координат вида  .
.
Представим
преобразование в форме: ![]()
Данное отображения называется регулярным преобразованием координат, так как преобразование φ(x) является диффеоморфизмом .
Эквивалентную модель получим в виде:

Тогда система описывается уравнением:
Решение для полученной системы имеет вид :
![]()
Свойство эквивалентности систем проверяется выражением:
![]()
 - равенство выполняется, значит
системы эквивалентны.
- равенство выполняется, значит
системы эквивалентны.
1.2
Преобразование
координат вида![]()
![]()
Проведя рассуждения аналогичные пункту 1.1, выясняем, что данное отображения является регулярным преобразованием координат.
Полученная модель будет описываться выражением:

Решение имеет вид:
Свойство эквивалентности систем проверим выражением:
![]()
![]()
Равенство выполняется, следовательно, системы эквивалентны.
Исследуем переходные процессы эквивалентных систем и проверим их основные свойства.
Рис.1- схема моделирования эквивалентных систем.
Переходные процессы полученных систем представлены на рисунке 2.
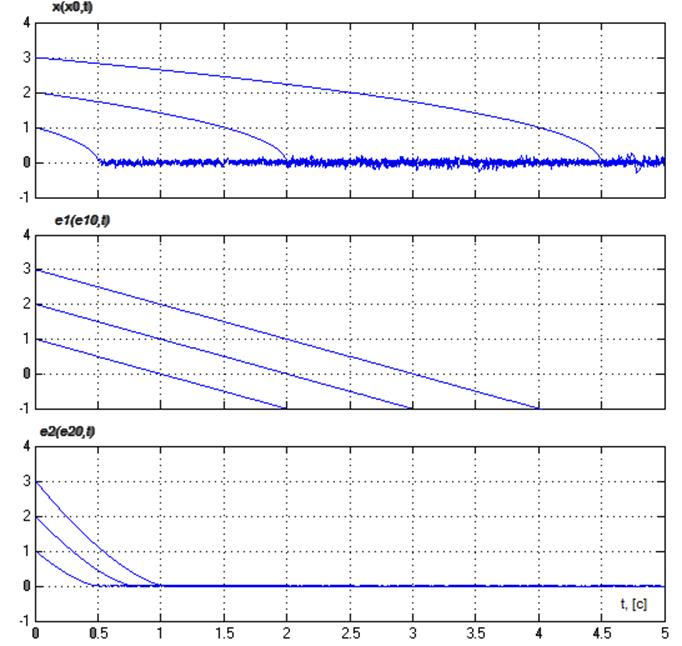
Рис.2- переходные процессы эквивалентных систем.
· ![]() .
.
Система неполная, неустойчивая.
· ![]() .
.
Система полная, неустойчивая.
· .
Система неполная, неустойчивая.
2. Преобразование к нормальной форме.
Цель работы: преобразовать заданные модели ОУ к нормальной форме и проанализировать устойчивость нулевой динамики эквивалентных систем.
Исследование:
Пусть нелинейная система задана в форме:
Нормальная форма системы представляется в виде:
Где 
 ,
, 
![]()
ρ- относительная степень системы.
Относительная степень системы будет определятся с помощью последовательного дифференцирования уравнения выхода.
· ОУ1:
В заданной системе:
Для векторной функции
Следовательно,

Тогда,

Для приведения к нормальной форме, вычислим:
Нуль-динамика системы устойчива.
Проведем далее аналогичные рассуждения для других объектов управления.
ОУ2:
a) 
Относительная степень системы:

Параметры нормальной формы модели:
Нуль-динамика системы неустойчива.
b) 
Относительная степень системы:
Параметры нормальной формы модели:
Нуль-динамика системы устойчива.
c) 
Относительная степень системы:
Параметры нормальной формы модели:
Нуль-динамика системы неустойчива.
d) 
Параметры нормальной формы модели:
Нуль-динамика системы устойчива.
ОУ3:
a) 
Относительная степень системы:

Параметры нормальной формы модели:
b) 
Относительная степень системы ![]()
Параметры нормальной формы модели:
c) 
Параметры нормальной формы модели:
Вывод: в ходе работы получены модели эквивалентные заданной с помощью указанного преобразования координат, проверена их эквивалентность, подтверждено сходство основных свойств эквивалентных моделей. Заданные нелинейные системы приведены к нормальной форме и исследована устойчивость их нуль-динамики.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.