3.Синтез схемы автосапровождения цели по азимуту.
Напряжение огибающей может использоваться для управления антенной системой и автоматического совмещения облучателя антенны с направлением на цель. Т.к. цель относительно равносигнальной зоны может быть смещена по азимуту, то автоматическое сопровождение должно осуществляется с помощью следящей системы осуществляющей сопровождение в горизонтальной плоскости.
Следящая система состоит из амплитудно-фазового различителя, генератора опорного напряжения, усилителей напряжения и мощности и приводного двигателя, изменяющего положение антенны.
Работа следящей системы такова: сигналы цели поступают на детектор, который выделяет напряжения огибающей импульсов цели. Усиленное напряжение, называемое обычно сигналом ошибки, представляет собой гармоническое
колебание, амплитуда которого характеризует
величину смещения цели относительно оси антенны, а фаза –направление этого смещения.Напряжение сигнала ошибки подается на амплитудно-фазовый
различитель, в котором происходит разложения
напряжения ошибки на составляющие,
пропорциональные смещению цели по азимуту.Разложение сигнала ошибки производится с помощью опорных
напряжений, вырабатываемых специальным
генератором.Последний, вращаясь синхронно с облучателем, создает два гармонических колебания частоты ![]() , сдвинутых по фазе на
, сдвинутых по фазе на ![]() .Обычно эти напряжения преобразутся в прямоугольные колебания
и в таком виде подводятся к соответствующим фазовым различителям.В результате совместного действия
сигнала ошибки и опорного напряжения на выходе фазового различителя
вырабатывающий сигнал,
пропорциональный отклонению цели в соответствующей плоскости.Управляющее напряжение усиливается и
подводится к исполнительному двигателю.В устройство углового сопровождения входят корректирующие цепи, улучшающие динамические свойства
системы и устраняющие возможность возникновения в ней автоклебаний.
.Обычно эти напряжения преобразутся в прямоугольные колебания
и в таком виде подводятся к соответствующим фазовым различителям.В результате совместного действия
сигнала ошибки и опорного напряжения на выходе фазового различителя
вырабатывающий сигнал,
пропорциональный отклонению цели в соответствующей плоскости.Управляющее напряжение усиливается и
подводится к исполнительному двигателю.В устройство углового сопровождения входят корректирующие цепи, улучшающие динамические свойства
системы и устраняющие возможность возникновения в ней автоклебаний.
В качестве приводов антенны чаще всего используются двигатели постоянного тока.
Таким образом ось антенны с точностью до ошибки автосопровождения совпадает с направлением на цель.
Положение оси антенны однозначно определяет угловые
координаты цели. Очевидно, что автоматическое сопровождение
направлению возможно лишь в том случае, если на детектор огибающей попадают сигналы только от одной цели. Это обеспечивается путем
стробированием приемника селекторным импульсом, вырабатываемым системой автоматического сопровождением по
дальности.![]()
Рассмотрим подробнее структуру приемника РЛС.
Сигнал с известной начальной фазой можно записать в виде:
![]() , где s(t)-сигнал
цели, u(t)-шум,
, где s(t)-сигнал
цели, u(t)-шум, ![]() -const.
-const.
![]() , в смеси есть полезный сигнал,
, в смеси есть полезный сигнал,
![]() , в смеси нет полезного сигнала.
, в смеси нет полезного сигнала.
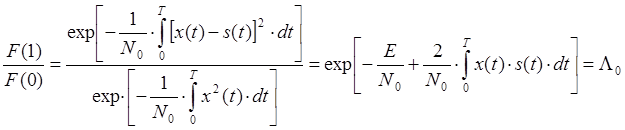
Воспользуемся критерием отношения функционалов правдоподобия:
 ;
;
В процессе выполнения курсовой работы была рассчитана РЛС обнаружения с когерентной обработкой сигнала.
Были рассчитаны основные показатели РЛС, которые определяются тактико-техническими требованиями.
Исходя из заданных параметров нам пришлось использовать сложный сигнал (ЛЧМ) с В=5.52
Синтез проведен для схемы автосопровождения цели по азимуту.
Полученные данные вполне удовлетворяют поставленной задаче по проектированию РЛС.
1.Методические указания к практическим занятиям и курсовому проектированию по дисциплине ”РТС”.
2.Радиотехнические системы.В.А.Чердынцев
Мн. ”Высшая школа” 1988г.
3.Теоретические основы радиолокации.
Под ред.В.Е.Дунаева. М.”Сов.радио”1978г.
4.Конспект лекций по курсу РТС.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.