Ключи работают одновременно, например, на первом интервале замкнуты ключи VT1 и VT3 и на левый зажим якоря подан плюс, а на втором интервале замкнуты ключи VT2 и VT4 и на левый зажим подан минус источника. В результате к двигателю подается напряжение Uср=(2g-1)U. Следовательно механическая характеристика определяется выражением:
wср=((2g-1)/kэм)U – (Rя/kэм2)M.
Изменяя g, можно изменить не только значение, но и направление угловой скорости. При 1³g³0.5 угловая скорость при холостом ходе положительна, при 0.5 ³ g ³ 0 - отрицательна.
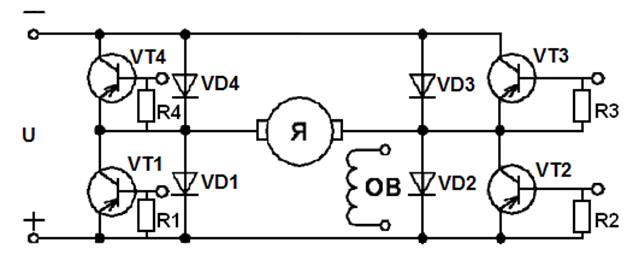
Рис. 4. Мостовая схема реверсивного ШИП
В разомкнутой системе тахограмму (рис.1) реализовать нельзя, т.к. требуется время для разгона и торможения, следовательно, используется замкнутая система.
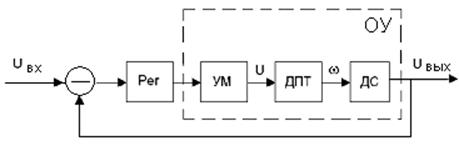
Рис .5. Структурная схема системы управления ДПТ
где Рег – регулятор;
ОУ – объект управления, включающий в себя:
УМ – усилитель мощности, обеспечивающий линейность;
ДПТ – двигатель постоянного тока;
ДС – датчик скорости;
Технические требования к устройству управления ДПТ
По техническим данным ДПТ СЛ-621 можно сформулировать технические требования к устройству управления ДПТ:
1. Устройство управления должно обеспечивать угловую скорость в разных направлениях. При этом диапазон изменения частоты вращения должен находиться в диапазоне ± Wmax рад/с.
2. Полная
электрическая мощность, подводимая к двигателю равна P=U(Iя+Iв)=110В![]() (0,16+2,3)А=270,6Вт. Соответственно
устройство управления должно быть способно обеспечить данную мощность.
(0,16+2,3)А=270,6Вт. Соответственно
устройство управления должно быть способно обеспечить данную мощность.
3. Выбор транзисторов VT1-VT4, а также 4-х диодов VD1-VD4 обуславливается величиной напряжения питания, максимального тока двигателя.
4. Номинальные значения токов в моменты запуска и торможения будут превышаться. Во всех предыдущих пунктах необходимо также учитывать и погрешности.
Оценка параметров динамической модели ДПТ
Параметры для моделирования двигателя СЛ-621 с учетом [2]:
- коэффициент, характеризующий свойства двигателя
 ;
;
- индуктивность якоря, Гн
-электромагнитная постоянная времени обмотки якоря, с
- электромеханическая постоянная привода, с
Настройка параметров регулятора
Передаточная функция регулятора
подбирается так, чтобы при включении последовательно с соответствующим звеном
системы была скомпенсирована большая постоянная времени ![]() и
взамен ее действовала существенно меньшая постоянная времени
и
взамен ее действовала существенно меньшая постоянная времени ![]() .
.
В данной системе используются регуляторы двух типов:
-
пропорциональный (П) с
передаточной функцией ![]() ;
;
-
пропорционально-интегральный (ПИ),
 ;
;
где 
![]() - коэффициенты передачи интегрального и пропорционального регуляторов.
- коэффициенты передачи интегрального и пропорционального регуляторов.
Значения параметров регуляторов приведены в табл.4.
Таблица 4
|
Параметр системы |
Значение |
|
Пропорциональная составляющая (контур тока) |
10 |
|
Интегральная составляющая (контур тока) |
10 |
|
Дифференциальная составляющая (контур тока) |
- |
|
Пропорциональная составляющая (контур скорости) |
10 |
|
Интегральная составляющая (контур скорости) |
- |
|
Дифференциальная составляющая (контур скорости) |
- |
Коэффициенты ПИД-регуляторов можно определить методом подбора, что объясняется легкостью компьютерного моделирования средствами MatLab и тем, что применение регулярных методов подбора коэффициентов затруднено в связи со спецификой ШИПа из-за ограничений уровня сигнала. Выбранные коэффициенты обеспечивают процессы в системе, без перерегулирования и с наименьшей статической ошибкой.
4. МОДЕЛИРОВАНИЕ ДПТ СЛ-621
Моделирование разомкнутого привода на основе ДПТ НВ при помощи Simulink.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.