























1. ОПИСАНИЕ РАБОТЫ МЕХАНИЗМА
В данном курсовом проекте рассматривается методика выбора электродвигателя для электропривода механизма подъема канатной тали с асинхронным двигателем с фазным ротором.
Исходные данные:
- номинальная грузоподъемность крана – mном= 2000 кг;
- масса крюка – mк=30 кг;
- максимальная высота подъема – H=9 м;
- номинальная скорость подъема – vном=15 м/мин;
- пониженная скорость – vпон=1,5 м/мин;
- диаметр барабана – D =0,25 м;
- кратность полиспаста i=2
- продолжительность включения – ПВ=40%;
- номинальный КПД передачи – hп.ном=87%;
-
допустимое ускорение – а£0,2м/с![]()
Цикл работы:
1) опускание крюка с высоты 9 м на землю;
2) загрузка;
3) подъем номинального груза на высоту H1=6 м;
4) снятие груза 500 кг;
5) перемещение груза 1500кг;
6) опускание груза 1500 кг на высоту H2=3 м;
7) снятие груза 1000 кг;
8) подъем 500 кг с H2=3 м до H=9 м;
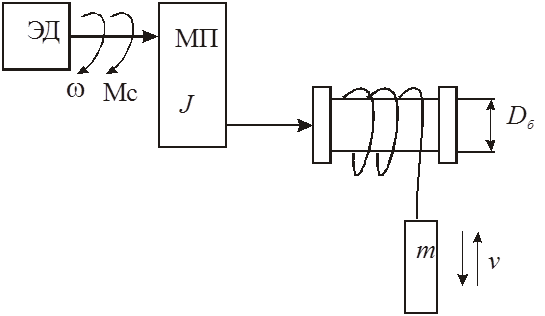 |
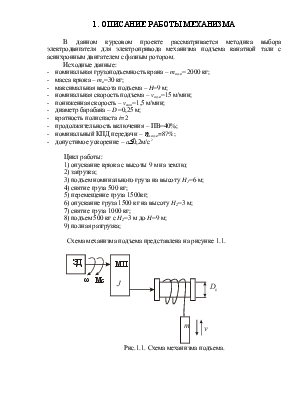
Схема механизма подъема представлена на рисунке 1.1.
Рис.1.1. Схема механизма подъема.
2. Расчет статической мощности и времени выполнения технологической операции за цикл работы.
Статическая мощность двигателя при подъеме номинального груза:
 Вт (2.1)
Вт (2.1)
Статическая мощность при подъеме груза массой 500 кг:
 Вт (2.2)
Вт (2.2)
Статическая мощность двигателя при опускании крюка без груза:
 ; (2.3)
; (2.3)
где ηп – КПД передачи, определяемый частичной загрузкой механизма:
ηп=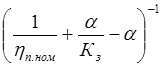 =
= 
где a=0,07…0,1; принято a=0,1.
Коэффициент загрузки вычисляется по формуле (2.4):
![]()
 =
= (2.4)
(2.4)
Статическая мощность двигателя при опускании груза массой 1500 кг:
 Вт; (2.5)
Вт; (2.5)
Рассчитаем время цикла и работы электропривода:
время опускания крюка:
 c (2.6)
c (2.6)
подъема номинального груза на 6 м:
 с (2.7)
с (2.7)
время опускания груза 1500 кг на высоту 3м:
 c (2.8)
c (2.8)
время подъема груза 500 кг на высоту с 3м до 9м:
 с (2.9)
с (2.9)
время работы:
![]() с (2.10)
с (2.10)
время всего цикла:
 с (2.11)
с (2.11)
время пауз:
![]() с (2.12)
с (2.12)
Время загрузки и разгрузки груза, а также перемещения груза в горизонтальном положении принимаем из времени пауз и массы груза:
![]() с
с
![]() с
с
Рассчитаем эквивалентную статическую мощность (при ПВ=40%):
 =
=
= Вт (2.13)
Вт (2.13)
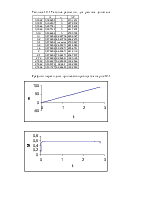
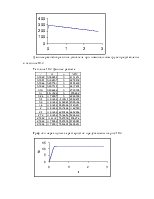
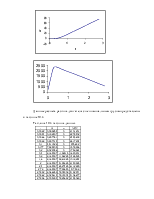
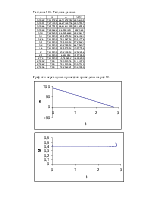
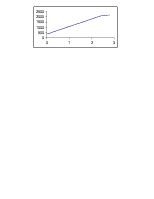
3. Построение скоростной v(t) и нагрузочной P(t) диаграмм механизма и предварительный выбор мощности двигателя.
Диаграммы скорости и статической мощности
Рисунок 2.1 Диаграммы скорости и статической мощности.
Мощность электродвигателя предварительно рассчитывается исходя из статической нагрузки механизма и режима работы электропривода.
Рассчитаем мощность, требуемую для предварительного выбора двигателя:
![]() Вт (3.1)
Вт (3.1)
Так как предполагаем выбирать двигатель для ПВ=25% то произведем пересчет эквивалентной статической мощности при ПВ=40%:
![]() =
= ![]()
 Вт
Вт
4. Выбор типа электродвигателя и расчет оптимального передаточного числа редуктора.
Из условия,
что ![]() выбираем двигатель МТ111-6 со следующими
параметрами: Pн=3,5 кВт; nн=915
об/мин; lm=2,3;
cos jном=0,7; I1н=10,5
А;
выбираем двигатель МТ111-6 со следующими
параметрами: Pн=3,5 кВт; nн=915
об/мин; lm=2,3;
cos jном=0,7; I1н=10,5
А;
R1=2,16 Ом; x1=2,03 Ом; I2н=13,7 А; R2=0,525 Ом; x2=0,755Ом; ке=1,96;
Е2н=181 В; .Jд=0.0488кг×м²
Для выбора редуктора из формулы (4.1) выражаем и вычисляем требуемое передаточное число редуктора:
 (4.1)
(4.1)
 (4.2)
(4.2)
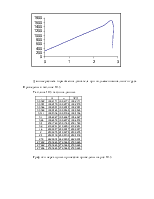
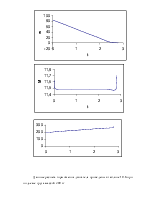
5. Расчет и построение скоростной и нагрузочной диаграмм электропривода
Нагрузочная диаграмма ЭП представляет собой зависимость электромагнитного момента М, или тока I от времени работы механизма. В случаях, когда момент и ток связаны линейной зависимостью, обычно нагрузочную диаграмму строят для момента, который определяют из основного движения электропривода:
 (5.1)
(5.1)
где Мс – статический момент на валу двигателя, Нм;
J – суммарный момент инерции ЭП, кг м2;
w – угловая скорость двигателя, рад/с.
Динамический момент ЭП предварительно определяют приближенно, принимая линейный закон изменения скорости, то есть:
 (5.2)
(5.2)
где,  рад/с
– установившаяся скорость двигателя на данном интервале скоростной диаграммы;
рад/с
– установившаяся скорость двигателя на данном интервале скоростной диаграммы;
tп,т – время пуска (торможения), с;
e –угловое ускорение (замедление), рад/с2.
Определим радиус приведения поступательного движения груза к вращательному движению двигателя:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.