режимом работы таких электроприводов является режим с вентиляционным моментом нагрузки. Преимуществом является то, что схемы электроприводов получаются сравнительно простыми. Принципиальная схема системы управления выглядит следующим образом:
|
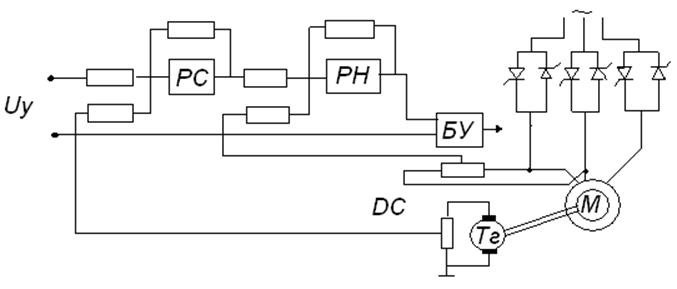
Рис.15. Принципиальная схема системы управления асинхронным электроприводом с воздействием на напряжение статора.
Т.е. следует рассматривать частный случай управления, соответствующий постоянству частоты статора. Принципиальная схема системы управления асинхронным ЭП с возмущающим воздействием на напряжение статора показаны на рис.15. Регулирование напряжения производится путём сдвига на фазе управляющих импульсов в тиристорах, включаемых по противопараллельной схеме в каждую фазу статора двигателя. Система выполняется двухконтурной. Для статического режима работы асинхронного ЭД можно записать:
 , где Мкр.н – критический
момент при номинальном напряжении статора.
, где Мкр.н – критический
момент при номинальном напряжении статора.
|
Мн=Кwн2
К=Мн/wн2=19.7/151.32
J=U1α / U1αн – относительные напряжения статора принимаем равными как 1/220=0.0045;
V– относительная частота статора равна 1;
Sкр – абсолютное скольжение электродвигателя в рабочей точке;
Тэл=1/(2πfsкр)=1/(2∙3.14∙50∙0.394)=0.0081 – электромагнитная постоянная времени;
Тм= JΣwн/Мн=(0.023∙152.3)/49.2=0.07128 – электромеханическая постоянная времени;
w0 – угловая скорость статора, рад/с
Реактивная мощность в режиме холостого хода, вар
 , (7.1)
, (7.1)
где q – расчетный коэффициент, зависящий от cosφном:
![]() =0,398 (7.2)
=0,398 (7.2)
 (вар)
(7.3)
(вар)
(7.3)
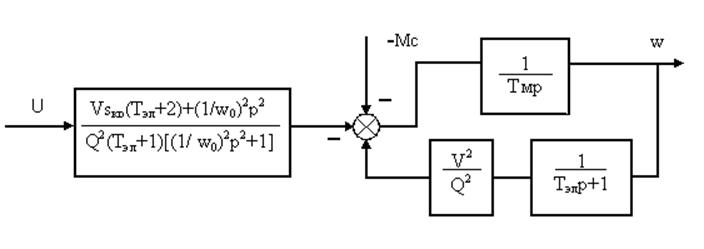
Рис.16. Структурная схема асинхронного электродвигателя.
Для построения САУ необходимо рассчитать регулятор скорости, напряжения, атак же датчики обратных связей по скорости и напряжению. Линеаризованные механические характеристики в замкнутой системе описываются следующими уравнениями:
 , (7.4)
, (7.4)
где w0 – скорость идеального холостого хода, рад/с;
βз.с. – модуль жесткости механической характеристики в замкнутой системе
 (7.5)
(7.5)
где Км – коэффициент пропорциональности для электромагнитного момента, Нм/А;
Крс – коэффициент усиления регулятора скорости;
Кос – коэффициент обратной связи по скорости;
Крн – коэффициент усиления по напряжению;
Обычно величиной βз.с задаются, исходя из требований, предъявляемых к электроприводу. Выбираем тахогенератор для осуществления обратной связи по скорости, что позволяет рассчитать Кос. Другие коэффициенты, входящие в состав уравнения (6.5) определяются следующим образом:
 (7.6)
(7.6)
Рассчитаем βз.с , который обеспечивает частоту вращения двигателя 1500 обр/мин.
 (7.7)
(7.7)
другие коэффициенты определяем из следующих соотношений, входящих в формулу для жесткости:
 , где
, где
(7.8)
Rγ – определяются по формуле:
(7.9)
Rγ’– активное сопротивление статора, приведённое к обмотке ротора;
X1’– индуктивное сопротивление статора, приведённое к обмотке ротора
Принимаем соотношение когда ![]()
![]() , так
как пренебрегаем напряжением на тиристорах.
, так
как пренебрегаем напряжением на тиристорах.
Далее рассчитаем коэффициент обратной связи по скорости
(7.10)
Выбираем тахогенератор АТ-261:
Частота вращения 1500 обр/мин
Напряжение возбуждения 110В
Ток возбуждения 0,35А
Крутизна Uвых 4,8÷5,8 мВмин/обр
Рассчитаем напряжения:
Входное напряжение делителя
 ,
,
Теперь можем определить коэффициент Крс и Косн
 .
.
где Косн – коэффициент обратной связи по напряжению;
β – коэффициент усиления преобразователя равен J∑/Tэм= 38
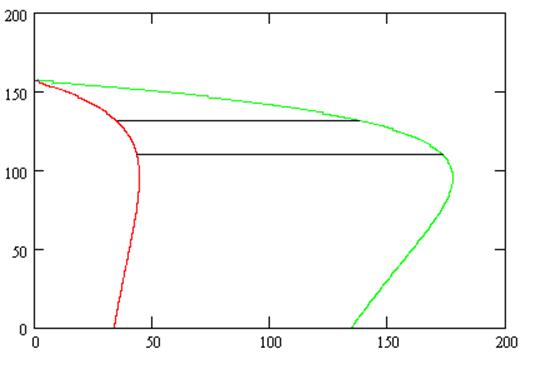
Рис.17. Статические характеристики замкнутой системы
Рассчитав все необходимые для структурной схемы параметры, построим её.
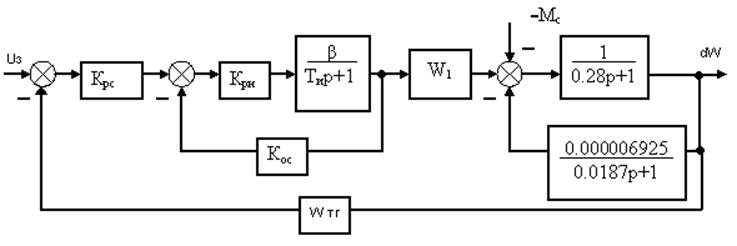
Рис.18. Структурная схема АД.
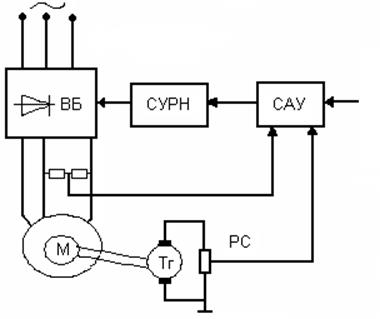
Рис.19. Силовая схема.
Таблица 3.
|
Сокращение |
Пояснение |
|
СУРН |
Система управления регулированием напряжения |
|
САУ |
Система автоматического управления |
|
Тг |
тахогенератор |
|
ВБ |
Вентильный блок |
Номинальный ток двигателя:
 (7.11)
(7.11)
где ![]() – номинальная мощность
двигателя, кВт;
– номинальная мощность
двигателя, кВт;
ηн – номинальный КПД двигателя, %
Среднее и действующее значения ![]() и
и
![]() тока через тиристор, А:
тока через тиристор, А:
![]() ,
(7.12)
,
(7.12)
![]() (7.13)
(7.13)
![]()
Коэффициент формы тока:
 (7.14)
(7.14)
Предварительно выбираем тип тиристора и проверяем подходит ли он по следующему соотношению:
![]() ,
(7.15)
,
(7.15)
где ![]() – коэффициент,
учитывающий отклонение условий работы вентиля от номинальных. Значения
– коэффициент,
учитывающий отклонение условий работы вентиля от номинальных. Значения ![]() принимают из меньших значений, если условия
работы выпрямителя лучше;
принимают из меньших значений, если условия
работы выпрямителя лучше;
![]() – коэффициент, запаса по току в рабочем
режиме.
– коэффициент, запаса по току в рабочем
режиме.
Таблица 4.
|
Тип тиристора |
Т142-50 |
|
Тип охладителя |
0241-80 |
Основные параметры тиристора необходимые для расчёта:
Таблица 5.
|
Обозначение |
Табличное значение |
В чём измеряется |
|
Uт(то) |
1.2 |
B |
|
rт |
6.4∙10-3 |
OM |
|
Rthjc |
0.4 |
˚C/Вт |
|
Rthha |
2.1 |
˚C/Вт |
|
Rthch |
0.15 |
˚C/Вт |
|
TTAVm |
15 |
˚C |
|
Ta |
40 |
˚C |
|
UDRM |
600-1300 |
B |
Проверяем:
0.9∙1.3∙10.6=12.402
TTAVm=15 т.е. 12.402≤15, значит условие выполняется.
Для выбранного тиристора вычисляют по формуле 7.6 максимально допустимый ток при заданных условиях работы:
 , (7.16)
, (7.16)
где ![]() – пороговое напряжение
– пороговое напряжение
![]() – дифференциальное
сопротивление в (Ом);
– дифференциальное
сопротивление в (Ом);
![]() – максимально допустимая
температура перехода в (°C);
– максимально допустимая
температура перехода в (°C);
![]() – температура
охлаждающей среды в (°C);
– температура
охлаждающей среды в (°C);
![]() – тепловое
сопротивление переход – среда (°C/Вт), вычисляемое по формуле
– тепловое
сопротивление переход – среда (°C/Вт), вычисляемое по формуле
![]() , (7.17)
, (7.17)
где ![]() –
тепловое сопротивление переход – среда;
–
тепловое сопротивление переход – среда;
![]() –
тепловое сопротивление корпус – контактная поверхность охладителя;
–
тепловое сопротивление корпус – контактная поверхность охладителя;
![]() – тепловое
сопротивление охладитель – охлаждающая среда.
– тепловое
сопротивление охладитель – охлаждающая среда.

![]() .
(7.18)
.
(7.18)
1.3∙15=19.5А, а это больше 19.0А
Значит условие выбора тиристора выполняется.
Максимально допустимое напряжение, прикладываемое к вентилю в схеме преобразователя не должно превышать допустимого значения повторяющегося импульсного напряжения, определяющего класс вентиля по напряжению
![]() , (7.19)
, (7.19)
где ![]() -
коэффициент запаса по напряжению;
-
коэффициент запаса по напряжению;
![]() - коэффициент,
учитывающий повышение напряжения сети;
- коэффициент,
учитывающий повышение напряжения сети;
![]() - максимальное значение
напряжения на тиристоре.
- максимальное значение
напряжения на тиристоре.
1.3∙1.1∙380=543.4≤1300В
Средние потери мощности для тока, соответствующего перегрузке:
![]() ,
(7.20)
,
(7.20)
где ![]() ,
, ![]() – коэффициент запаса по току рабочей
перегрузки.
– коэффициент запаса по току рабочей
перегрузки.
![]()
Средние потери мощности для тока, предшествующего перегрузке, Вт:
![]() ,
(7.21)
,
(7.21)
![]()
Переходные сопротивления переход – среда,°C/Вт:
 (7.22)
(7.22)

По графику зависимости ![]() определяют
допустимое время перегрузки. tпер=0.1сек.
определяют
допустимое время перегрузки. tпер=0.1сек.
Проверяем соотношение
tпер<tпер.mах (7.23)
0.1<2
Таким образом, если соотношение (7.13) выполняется, то выбранный тиристор удовлетворяет требованиям перегрузочной способности.
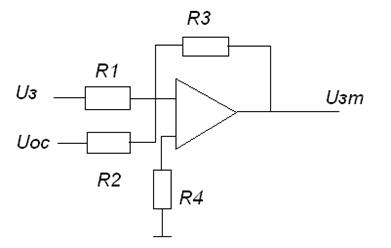
Рассчитываем блок РС :

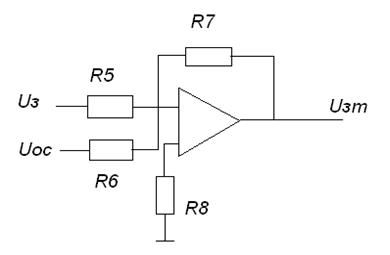
Рассчитаем блок РН:
8.Расчет переходных процессов (ПП) электропривода за цикл работы. Окончательная проверка выбранного двигателя.
С помощью приложения Matlab Simulink промоделируем систему электропривода:
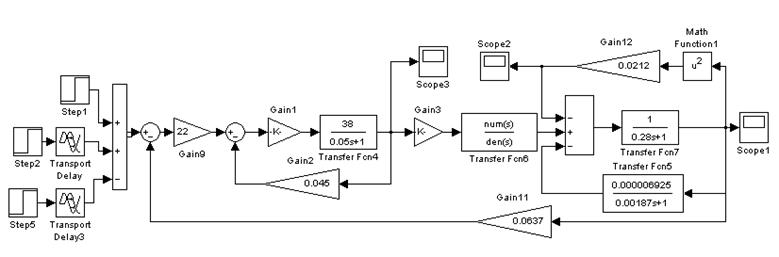
В результате получим переходные процессы по скорости (рис.19), по моменту (рис.20) и по напряжению (рис.21).
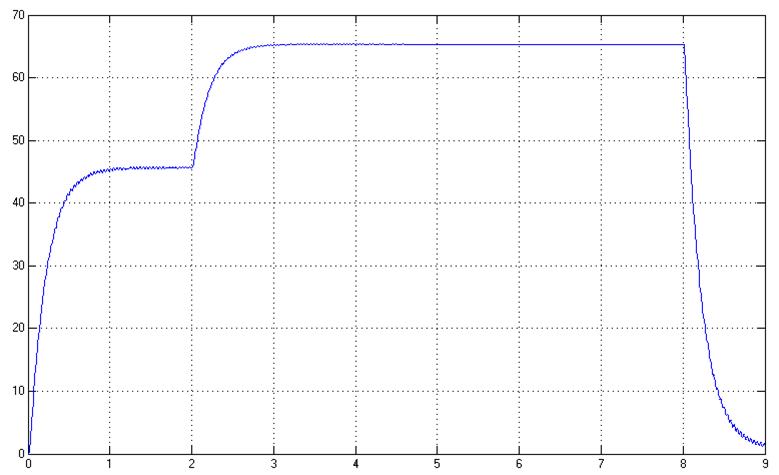
Рис.19 ПП по скорости
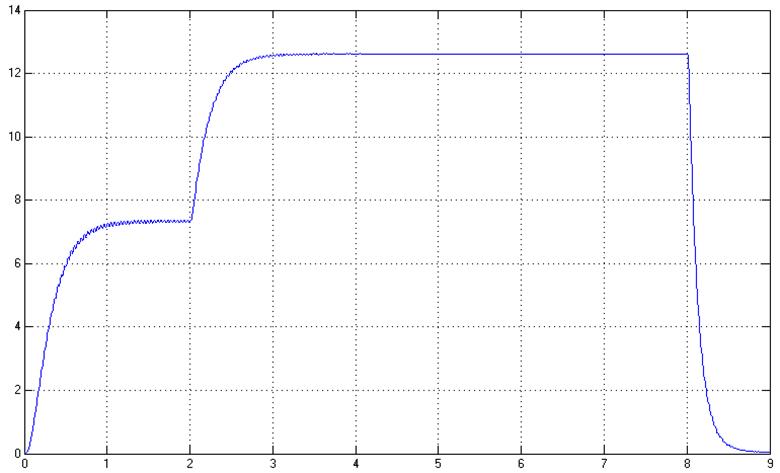
Рис.20 ПП по моменту
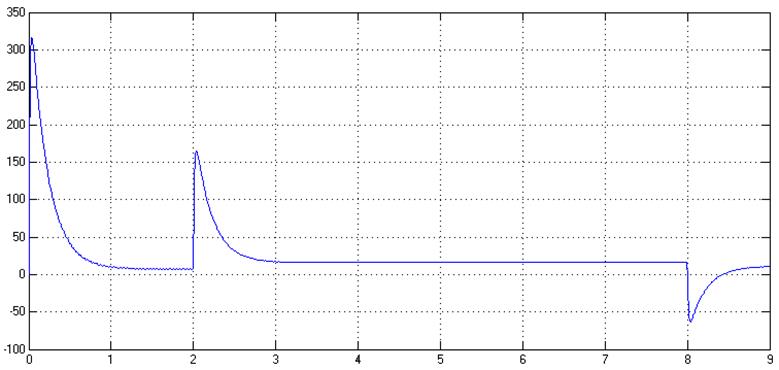
Рис.21 ПП по напряжению
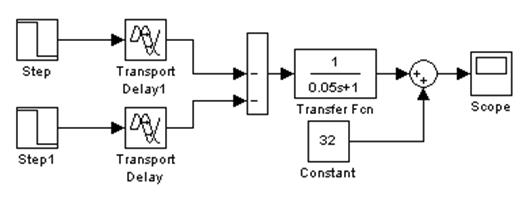
Рис.22 Модель объекта
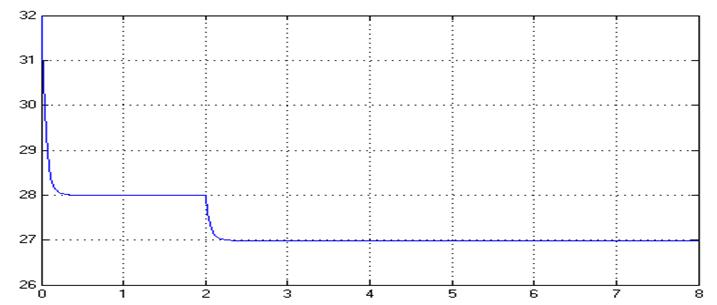
Рис.21 ПП температуры воды на выходе из градирни
Анализ энергетических показателей.
Средние потери мощности вычисляются следующим образом:
 , (8.1)
, (8.1)
где ΔРi – потери мощности на i-ом интервале нагрузочной диаграммы
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.




