Wтр = (е – р*t)/(Ттр*р + 1)
Второй контур регулирования состоит из датчика уровня WH(p), регулятора WР(p) и объекта Wfw(p).
Так как звено Ww(p) является усилительным, а инерционность участка трубопровода весьма незначительна по сравнению с инерционностью объекта регулирования уровня Wfw(p), то переходные процессы в первом контуре при внешних возмущениях завершаются раньше, чем во втором контуре.
Введение воздействия по расходу пара позволяет ликвидировать статическую ошибку пропорционального регулятора и отфильтровать возмущения со стороны изменения нагрузки. САР уровня с трехимпульсным регулятором ликвидирует эти возмущения при помощи быстродействующего первого контура регулирования, обеспечивая тем самым более высокое качество процесса регулирования.
Передаточная функция объекта регулирования уровня:
Wfw(p) = (е – р*t)/(Тоб*р + 1)
Передаточные функции фильтров имеют вид:
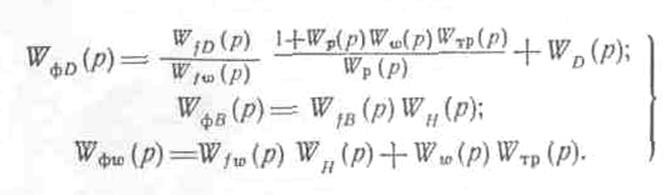
Требование оптимальной настройки корректирующего устройства по возмущению нагрузкой согласно запишется как:

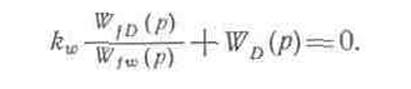
Учитывая допущение о том, что Wfd(p)» - WfW(p), имеем:
WD(p) = kD = kW.
Таким образом, условием оптимального воздействия по возмущению является равенство коэффициентов усиления датчиков расхода пара и воды. Корректирующее устройство по возмущению нагрузкой в динамическом отношении должно быть выполнено в виде усилительного звена с передаточной функцией:
Ww(p) =WD(p)=kW,=kD.
С учетом вышеизложенного структурную схему многоконтурной САР уровня с трехимпульсным регулятором, принципиальная схема которой изображена на рис.5, можно представить в виде стандартной структурной схемы (рис.13).
|
|
|
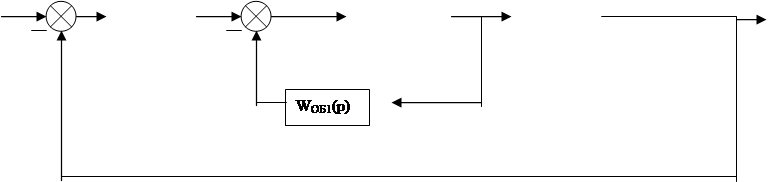 |
Рис.13. Структурная схема регулирования уровня без учёта возмущений.
При структурной схеме системы по рис.13 передаточные объекта:
WОБ = WFW(p) * WH(p) = коб(е – р*t)/(Тоб*р + 1)*кH;
WОБ1 = WТР(p) * WW(p) = (е – р*t)/(Ттр*р + 1)*кW.
2.3. Анализ основных нелинейностей.
Технологические объекты и другие звенья системы автоматического регулирования могут содержать нелинейные элементы. И в линейных регуляторах имеются области с нелинейной характеристикой, например за пределами зоны пропорциональности, которые не принимались во внимание. Если же эти области учитываются, их следует связать с другими основными нелинейностями контура регулирования.
Нелинейные характеристики систем регулирования определяются самими объектами, датчиками и регулирующими клапанами. Для каждой системы нелинейные характеристики элементов компенсируются таким образом, чтобы коэффициент передачи контура регулирования был постоянным. Это обеспечивает работоспособность схемы регулирования при различных условиях протекания процесса. Компенсация нелинейности осуществляется, как правило, регулятором, выполняющим функции линеаризующего устройства.
Регулирующий орган является наиболее ответственным элементом, определяющим работоспособность системы автоматического регулирования уровня при различных нагрузках объекта. Он должен иметь пропускную способность, обеспечивающую нормальную работу объекта при номинальной производительности.
Обычно считают, что для выполнения этого условия пропускная способность питательного клапана должна быть на 10— 15% больше номинальной производительности котла. В закрытом положении допускается нерегулируемый пропуск воды питательным клапаном не более 10% от номинальной производительности котла. Современные шиберные питательные клапаны на котлах высокого давления и поворотные — на котлах среднего давления обычно обеспечивают выполнение этого условия (рис. 14).
В питательном клапане и сочленяющих устройствах с исполнительным механизмом в результате некачественного монтажа или эксплуатационного износа возможно появление люфтов, что снижает устойчивость и качество работы системы автоматического регулирования.
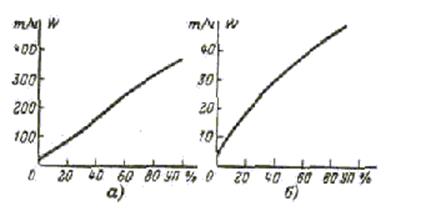
Рис.14. Примеры характеристик шиберных (а) и поворотных (б) питательных клапанов.
Поэтому в процессе наладки САР необходимо стремиться к ликвидации люфтов.
Оценку нелинейности типа «люфт» можно произвести по характеристике питательного клапана, снятой при прямом и обратном ходе. При наличии люфтов в питательном клапане и сочленениях характеристика клапана имеет вид петли гистерезиса. Удовлетворительной считается такая характеристика клапана, у которой «люфт» не превышает 3—5% от рабочего хода клапана.
Снятие расходной характеристики клапана наиболее удобно производить при средней нагрузке в следующей последовательности.
Устанавливают уровень в барабане котла выше среднего и питательный клапан переводят в положение «закрыто», фиксируя при этом начальный пропуск. Затем, перемещая клапан в сторону открытия, через каждые 10—15% хода фиксируют показания прибора, измеряющего расход воды на котел. Для оценки люфтов такую же операцию необходимо провести в сторону закрытия клапана.
После снятия характеристики клапана определяют постоянную времени исполнительного механизма Тим. (время, в течение которого питательный клапан пройдет полный диапазон регулирования при непрерывном движении исполнительного механизма).
Если в структурной схеме САР уровня питательный клапан рассматривается как усилительное звено, то из характеристики клапана определяется коэффициент усиления:
где Dm — приращение хода клапана;
DQ — соответствующее приращение расхода.
Коэффициент усиления клапана следует определять в рабочем диапазоне нагрузки. Если в рабочем диапазоне нагрузки характеристика клапана нелинейна, то необходимо определить максимальный коэффициент усиления.
Если в структурной схеме САР исполнительный механизм и питательный клапан представляются одним звеном, то из характеристики определяется скорость регулирования:
Скорость регулирования также определяется в рабочем диапазоне изменения нагрузки.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.