Балтийский Государственный Технический Университет
им Д.Ф.Устинова
«Военмех»
Кафедра А5

Лабораторная работа №1
Определение весовых функций разомкнутой САУ.
Вариант №23
Выполнил: Щербаков
Алексей, А482
Проверил: Санников
Виталий Андреевич
Санкт-Петербург, 2012
Цель работы: изучение методов определения весовых функций разомкнутой системы автоматического управления (САУ)
Основными характеристиками линейных стационарных динамических систем являются весовые функции и частотные характеристики. С помощью этих показателей могут решаться задачи анализа устойчивости и точности САУ при неслучайных и случайных воздействиях, а также задачи синтеза САУ.
Весовой функцией, или импульсной переходной функцией динамической системы, имеющей один вход и один выход, называется реакция системы в момент t на единичный импульс, действующей на систему в момент τ.
δ(t-τ) q(t,τ)
q(t,τ)
q(t,τ)=Atδ(t,τ)
где
q(t,τ) – весовая функция,
At – оператор динамической системы, преобразующий функцию времени t на входе системы в реакцию системы,
δ(t-τ) - импульсная δ-функцией называется функция, равная нулю всюду, кроме начала координат, принимающая бесконечное значение в начале координат, такая, что интеграл от нее по любому интервалу интегрирования, содержащему начало координат, равен единице:
δ(t)=0, если t≠0 1.1
δ(0)=∞
Весовая функция может быть получена моделированием, если на вход системы подать δ-функцию. Импульсное воздействие и весовая функция, рассматриваемые как функции текущего времени t при фиксированном значении τ=τ1, представлены на рис.1.2. Весовая функция отвечает условию физической возможности: q(t,τ)=0 при t<τ. Это условие отражает тот факт, что любая физическая система может реагировать в момент t только на воздействия, приложенные к системе до этого момента времени, т.е. при t >τ. Для стационарных систем весовая функция зависит только от разности аргументов t – τ:
q(t,τ)= q(t-τ). Выбирая момент τ=0, схему моделирования для определения весовой функции стационарной системы можно представить в виде рис.1.3. многомерная динамическая система, имеющая несколько входов и выходов, характеризуется матрицей весовых функций:
G(t,τ)=[qij(t,τ)]
Весовой функцией qij(t,τ), соответствующей i-му выходу и j-му входу, называется реакция системы в момент t на i-м выходе при действии в момент τ импульсного возмущения на j-м входе.
Весовые функции являются важными характеристиками динамических систем и позволяют определить реакцию системы на произвольные воздействия:
Xi(t)=
Где xi – фазовые координаты
Xjo – начальные условия
fj(0) –входные воздействия.
![]() δ(t-τ
δ(t-τ
![]() )
q(t,τ)
)
q(t,τ)
δ(t-τ1)
 |
![]()
![]() t
t
t=τ-τ1 t=τ-τ1
рис.1.2
δ(t) q(t)
 |
(τ=0)
Рис.1.3.
Описание работы и исходные данные
Рассмотрим систему стабилизации углового движения ЛА относительно ц.м. в продольной плоскости. В качестве программного движения принимается полет ЛА на заданной высоте с постоянной скоростью. Принимается, что динамика системы стабилизации описывается линейными дифференциальными уравнениями в отклонениях относительно программного движения.
1) ![]()
2) ![]()
3) ![]() =
=![]()
4) ![]()
где ![]() – угол атаки,
– угол атаки, ![]() - угол тангажа,
- угол тангажа, ![]() - угловая скорость тангажа,
- угловая скорость тангажа, ![]() -угол отклонения руля высоты,
-угол отклонения руля высоты, ![]() – известные динамические коэффициенты, i1,i2 – передаточные числа,
– известные динамические коэффициенты, i1,i2 – передаточные числа, ![]() -известная функция, задающая программу угла тангажа.
-известная функция, задающая программу угла тангажа.
в системе
уравнений индекс ![]() отклонений от программных значений опущен. Уравнения 1)-3)
описывают динамику ЛА, уравнение 4) – уравнение системы управления. При этои
рулевая машина считается безынерционной.
отклонений от программных значений опущен. Уравнения 1)-3)
описывают динамику ЛА, уравнение 4) – уравнение системы управления. При этои
рулевая машина считается безынерционной.
![]()
![]()
![]()
![]() Системе уравнений соответствует
структурная схема системы стабилизации угла тангажа.
Системе уравнений соответствует
структурная схема системы стабилизации угла тангажа.![]()
![]()
![]()
![]()
![]()

![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

![]()
![]()
![]()
![]()
![]()
![]()
Передаточная
функция ЛА, характеризующая передачу воздействия от входа![]()
до выхода ![]() , имеет вид
, имеет вид
Где
![]() – коэффициент усиления ЛА
– коэффициент усиления ЛА
 – постоянная времени ЛА
– постоянная времени ЛА
![]() – коэффициент демпфирования
– коэффициент демпфирования
![]() – постоянная
времени форсирующего звена.
– постоянная
времени форсирующего звена.
Для получения передаточной функции необходимо применить преобразования Лапласа к системе и решить полученную систему алгебраических уравнений.
Численные значения коэффициентов.
Исходные данные:
|
вариант |
|
|
|
|
|
|
|
23 |
-1.7 |
-3.8 |
-1.4 |
3.6 |
1.8 |
0.35 |
Задача 1.1
Определение весовых функций разомкнутой САУ.
Динамика углового движения неуправляемого ЛА описывается следующими уравнениями:

![]() =
=![]()
Входным
воздействием является отклонение руля высоты ![]()
Выходными
величинами - ![]()
Система характеризуется весовыми функциями
![]()
![]()
![]()
Которые
определяются моделированием, если на вход системы вместо ![]() подать
подать ![]() – функцию.
– функцию.
На основании
свойства ![]() – функции, определяемого соотношением 1.1, можно заменить
воздействие в виде
– функции, определяемого соотношением 1.1, можно заменить
воздействие в виде ![]() – функции начальными условиями. Тогда весовые функции
определяются моделированием однородной системы:
– функции начальными условиями. Тогда весовые функции
определяются моделированием однородной системы:
![]() =
=![]()
C начальными условиями
![]()
![]()
![]()
Таким образом для определения весовых функций
![]()
![]()
![]() (t)
(t)
Соответствующих разомкнутой системе, необходимо выполнить моделирование системы с начальными условиям. Моделирование осуществляется с помощью пакета Matlab, система дифференциальных уравнений решается методом Рунге-Кутта с постоянным шагом.
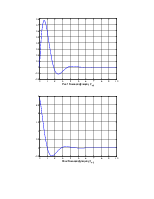
Интегрирование от t=0 до t=ТК=10 секунд
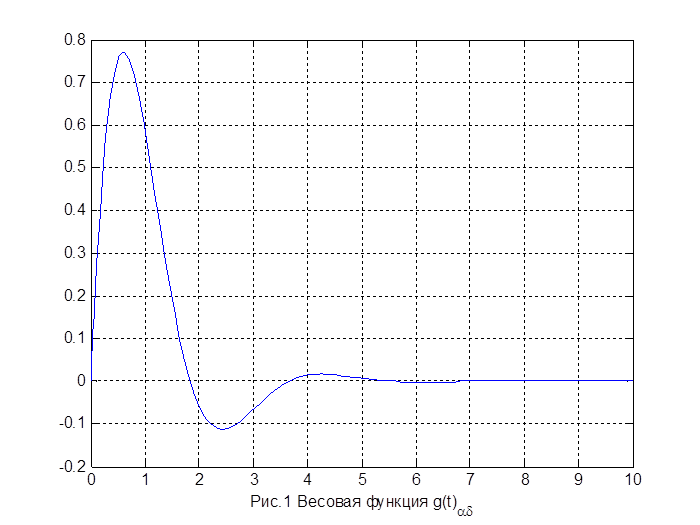
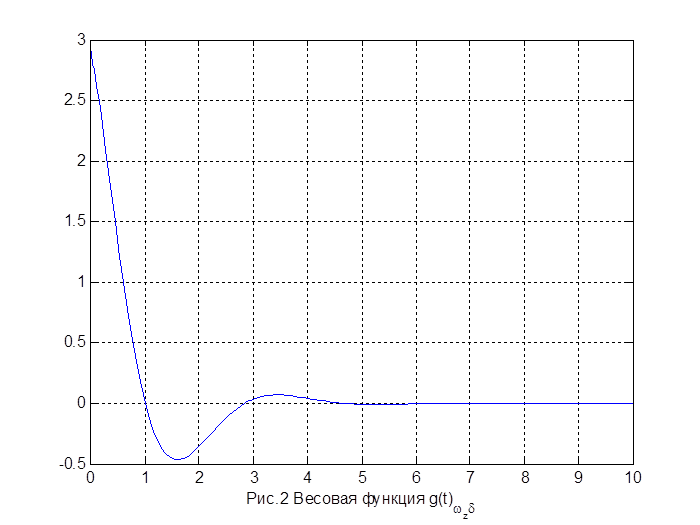
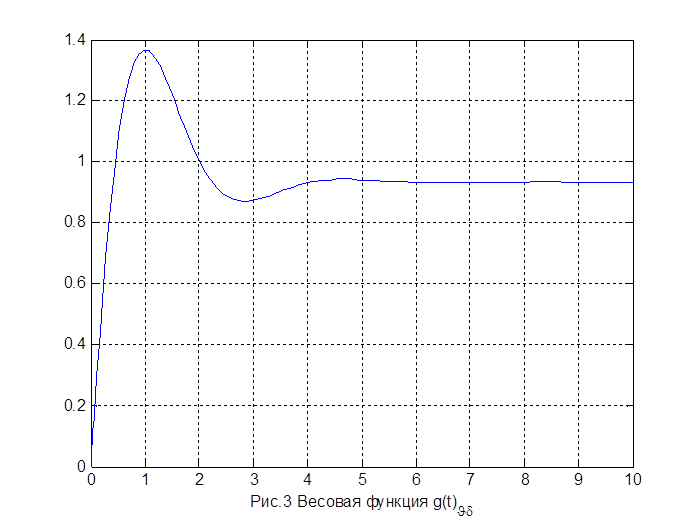
Таблица 1.2
|
t |
alpha |
wz |
teta |
|
0.00000 |
0.00000 |
2.90000 |
0.00000 |
|
0.43989 |
0.72966 |
1.51441 |
0.98768 |
|
1.07405 |
0.52796 |
-0.11828 |
1.36328 |
|
1.54740 |
0.15678 |
-0.46487 |
1.19917 |
|
2.09253 |
-0.08088 |
-0.31124 |
0.97326 |
|
2.52314 |
-0.11075 |
-0.10535 |
0.88483 |
|
3.09391 |
-0.05462 |
0.04900 |
0.87685 |
|
3.54252 |
-0.00864 |
0.06661 |
0.90532 |
|
4.08074 |
0.01521 |
0.03411 |
0.93348 |
|
4.52270 |
0.01459 |
0.00624 |
0.94199 |
|
5.09481 |
0.00514 |
-0.00932 |
0.93998 |
|
5.54030 |
-0.00035 |
-0.00870 |
0.93571 |
|
6.05941 |
-0.00239 |
-0.00347 |
0.93251 |
|
6.52017 |
-0.00177 |
0.00010 |
0.93182 |
|
7.07274 |
-0.00043 |
0.00145 |
0.93238 |
|
7.43479 |
0.00012 |
0.00119 |
0.93287 |
|
8.49646 |
0.00021 |
-0.00011 |
0.93336 |
|
8.61724 |
0.00016 |
-0.00016 |
0.93334 |
|
9.10287 |
0.00001 |
-0.00020 |
0.93324 |
|
9.60664 |
-0.00005 |
-0.00010 |
0.93316 |
|
10.00000 |
-0.00005 |
-0.00002 |
0.93314 |
Листинг программы
Файл lab1_1.m
function dy = lab1_1(t,y)
dy = zeros(3,1);
a22 = -1.7;
a32 = -3.8;
a33 = -1.4;
a35 = 3.6;
dy(1) = a22* y(1) + y(2);
dy(2) = a32* y(1) + a33 * y(2);
dy(3) = y(2);
Файл lab1.m
[T Y] = ode45(@lab1_1, [0 10], [0 2.9 0]);
dlmwrite('myfile1.txt', [T Y], 'delimiter', '\t', 'precision', '%10.5f', 'newline', 'pc');
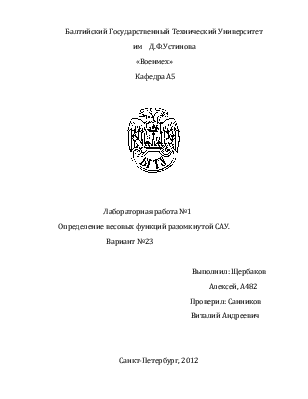
plot(T, Y(:,1));
xlabel('Рис.1 Весовая функция {g(t)_{\alpha\delta}}');
grid on;
figure;
plot(T, Y(:,2));
xlabel('Рис.2 Весовая функция {g(t)_{{\omega_z}\delta}}');
grid on;
figure;
plot(T, Y(:,3));
xlabel('Рис.3 Весовая функция {g(t)_{\vartheta\delta}}');
grid on;
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.