









Введение.. 2
1 Функциональное назначение.. 3
2 описание структуры создаваемой программы... 4
3 общая структура ГИМПМ (Proedit) 9
4 описание принципов работы и настройки.. 13
4.1 Формирование циклограммы работы модуля. 13
4.2 Работа с Proedit 17
5 пример создания.. 19
Введение
Имитационное моделирование производственной системы представляет собой многофакторный процесс, в рамках которого осуществляется моделирование отдельных модулей, объединенных в систему обработки.
С точки зрения общих подходов к процессу формирования моделей отдельных модулей нет разницы между созданием имитационной модели обрабатывающего модуля ГПС и автоматизированного склада цеха.
Программа ГИМПМ (Proedit) предназначена для создания рабочих файлов описания модулей (*.gpm ) для последующего их применением в системе GPS.
Управляющие модели транспортно-накопительного и обрабатывающего оборудования синтезируются Генератором имитационных моделей производственных модулей (ГИМПМ). Основой для его работы являются графические изображения примитивов узлов и механизмов ГПС, хранящиеся в базе данных (БД оборудование), а так же технологическая информация о режимах их работы (БД процесс).
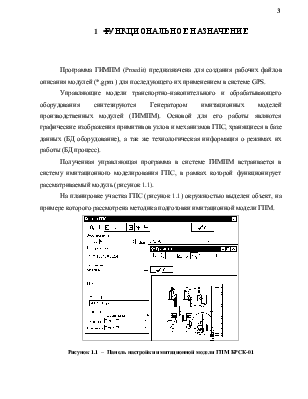
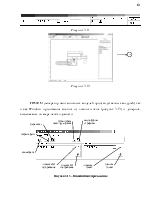
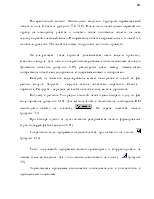
Полученная управляющая программа в системе ГИМПМ встраивается в систему имитационного моделирования ГПС, в рамках которой функционирует рассматриваемый модуль (рисунок 1.1).
На планировке участка ГПС (рисунок 1.1) окружностью выделен объект, на примере которого рассмотрена методика подготовки имитационной модели ГПМ.
Рисунок 1.1 – Панель настройки имитационной модели ГПМ БРСК-01
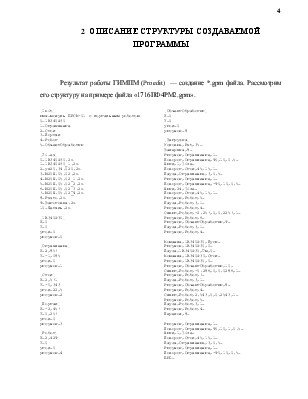
Результат работы ГИМПМ (Proedit) — создание *.gpm файла. Рассмотрим его структуру на примере файла «1716ПФ4РМ2.gpm».
[Init]
имя=модуль БРСК-01 с портальным роботом
0=1В340Ф30
1=Ограждение
2=Стол
3=Портал
4=Робот
5=ОбъектОбработки
[Files]
0=1В340Ф30.2d
1=1В340Ф30_1.2d
2=ух20.34.020.2d
3=М20Ц.05.02.2d
4=М20Ц.05.02_1.2d
5=М20Ц.05.02_2.2d
6=М20Ц.05.02_3.2d
7=М20Ц.05.02_4.2d
8=Pusto.2d
9=Заготовка.2d
10=Деталь.2d
[1В340Ф30]
X=0
Y=0
угол=0
рисунок=0
[Ограждение]
X=2,857
Y=-1,085
угол=0
рисунок=1
[Стол]
X=2,571
Y=-0,343
угол=22,5
рисунок=2
[Портал]
X=-2,457
Y=0,257
угол=0
рисунок=3
[Робот]
X=2,429
Y=0
угол=0
рисунок=4
[ОбъектОбработки]
X=0
Y=0
угол=0
рисунок=8
[Загрузка]
Условие,Put,35=
Задержка,8=
Рисунок,Ограждение,1=
Поворот,Ограждение,90,10,0.5=
Цикл,1,Size=
Поворот,Стол,45,15,1=
Пауза,Ограждение,3,0.5=
Рисунок,Ограждение,1=
Поворот,Ограждение,-90,10,0.5=
Цикл,24,Size=
Поворот,Стол,45,15,1=
Рисунок,Робот,5=
Пауза,Робот,3,1=
Рисунок,Робот,4=
Сдвиг,Робот,-2.257,0,0.2257,1=
Рисунок,Робот,6=
Рисунок,ОбъектОбработки,9=
Пауза,Робот,3,1=
Рисунок,Робот,4=
Команда,1В340Ф30,Пуск=
Рисунок,1В340Ф30,0=
Пауза,1В340Ф30,Тм,0=
Команда,1В340Ф30,Стоп=
Рисунок,1В340Ф30,0=
Рисунок,ОбъектОбработки,10=
Сдвиг,Робот,-0.286,0,0.0286,1=
Рисунок,Робот,7=
Пауза,Робот,3,1=
Рисунок,ОбъектОбработки,8=
Рисунок,Робот,4=
Сдвиг,Робот,2.543,0,0.2543,1=
Рисунок,Робот,5=
Пауза,Робот,3,1=
Рисунок,Робот,4=
Переход,8=
Рисунок,Ограждение,1=
Поворот,Ограждение,90,10,1,0.5=
Цикл,1,Size=
Поворот,Стол,45,15,1=
Пауза,Ограждение,3,0.5=
Рисунок,Ограждение,1=
Поворот,Ограждение,-90,10,0.5=
END=
Он состоит из следующих секций:
[Init] содержит название модуля («имя=модуль 1716ПФ4РМ2 с навесным роботом») и список объектов с порядковыми номерами (1716ПФ4РМ2, Объект обработки, Стол, Робот, Рука). Формат этой секции:
[Init]
имя=<имя модуля >
0=<объект 1>
…
к=<объект к>
[Files] В этой секции перечислены все файлы с изображениями (*.2d файлы). Они используются для наглядного представления каждого объекта в графической форме приложения.
[Files]
0=Файл1.2d
…
М=ФайлМ.2d
Следующие секции описывают начальные положения (параметры «х» и «у»), угол поворота («угол») и соответствующее изображение в виде ссылки на *.2d файл («рисунок») всех объектов. Положительное значение угла отсчитывается при вращении против часовой стрелки. Угол 0° принимается равным положительному направлению оси абсцисс. Количество этих секций соответствует количеству объектов в секции [Init].
[<имя объекта>]
x= (метры)
y= (метры)
угол= (градусы)
рисунок= (№ рисунка из секции Files)
[Загрузка] — обязательная секция. Здесь описана последовательность команд при загрузке модуля и обработку изделия. Строчка “END=” – признак завершения секции.
[Загрузка]
<команда1>=
…
END=
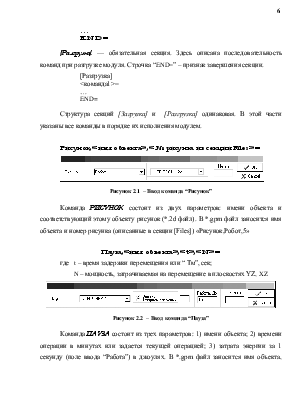
[Разгрузка] — обязательная секция. Здесь описана последовательность команд при разгрузке модуля. Строчка “END=” – признак завершения секции.
[Разгрузка]
<команда1>=
…
END=
Структура секций [Загрузка] и [Разгрузка] одинаковая. В этой части указаны все команды в порядке их исполнения модулем.
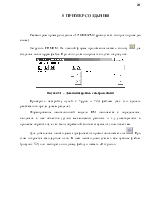
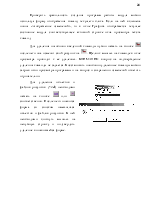
Рисунок,<имя объекта>,<№ рисунка из секции Files>=

Рисунок 2.1 – Ввод команда “Рисунок”
Команда РИСУНОК состоит из двух параметров: имени объекта и соответствующий этому объекту рисунок (*.2d файл). В *.gpm файл заносится имя объекта и номер рисунка (описанные в секции [Files]) «Рисунок,Робот,5»
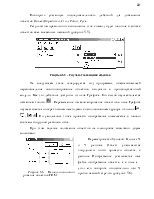
Пауза,<имя объекта>,<t>,<N>=
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.