управление всем технологическим оборудованием; диагностику работы всех технических средств с индикацией неисправностей и ошибок принятием соответствующих решений в управляющем вычислительном комплексе;
контроль точности базирования изделий и качества обработки (сборки);
диагностику состояния производственного инструмента с введением коррекции в управляющую программу и обеспечением автоматической замены инструмента;
доставку и подачу вспомогательных материалов: смазочно-охлаждающей жидкости, ветоши и др.;
удаление отходов из рабочей зоны ГПС;
комплектование, сборку и настройку приспособлений и инструмента;
техническое обслуживание и ремонт технических средств и др.
При определении функциональной структуры ГПС производится группирование однородных задач, выполняемых каждой функциональной подсистемой, т. е. распределение задач по подсистемам. Функционирование ГПС и ее подсистем проходит под действием входных воздействий. Физические элементы, к которым непосредственно прикладываются входные воздействия, будем называть входами. Сигналы, характеризующие определенные результаты функционирования ГПС, отражающие последствия входных воздействий, будем называть выходными величинами. Входные воздействия делятся на управляющие и возмущающие. Управляющие воздействия формируются целенаправленно - для перевода ГПС из одного состояния в другое, требуемое в настоящий момент времени. Возмущающие воздействия носят случайный характер и отражают изменения среды, чаще всего непредвиденные. Входные воздействия конкретно проявляются в форме информационных и материальных потоков. К информационным потокам относятся сведения о внешней среде, о состоянии рассматриваемой ГПС и других систем, с которыми она взаимодействует, а к материальным - различные виды ресурсов. Как управляющие, так и возмущающие воздействия вызывает ответную реакцию ГПС, которая проявляется в изменении состояния элементов ГПС, их характеристик и выходных величин.
Обобщая изложенное, можно определить функциональную структуру ГПС как многоуровневую систему, функционирующую в соответствии с заданной глобальной целью и объединяющую множество взаимодействующих функциональных элементов, сгруп-пированных в подсистемы различных уровней, выполняющих некоторые локальные цели, осуществление которых обеспечивает достижение глобальной цели.
Согласно принципу иерархической декомпозиции в составе ГПС будем выделять обеспечивающую и функциональную части (рис. 1.1).
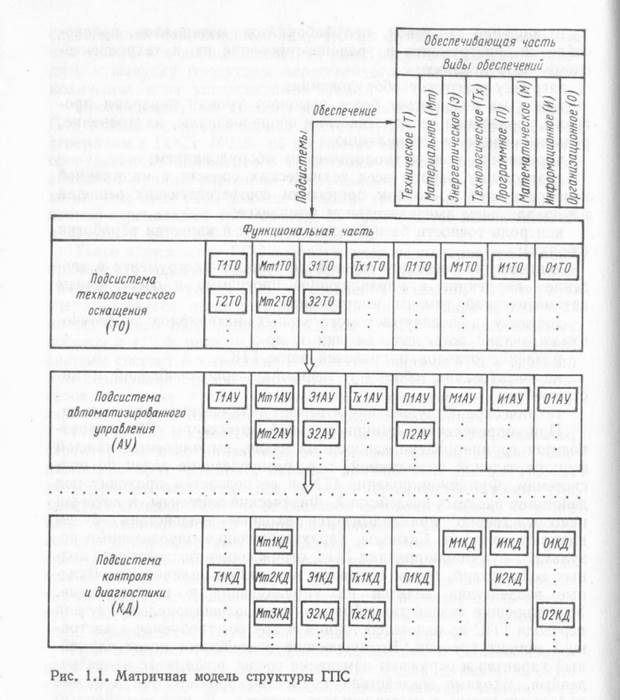
Обеспечивающая часть ГПС - это часть ГПС, состоящая из технического, материального, топливно-энергетического, технологического, программного, математического, информационного и организационного обеспечении.
Функциональная часть ГПО - есть часть, состоящая из ряда подсистем, выделенных по функциональным признакам.
Остановимся более подробно на принципах формирования функциональных подсистем ГПС, которое осуществляется по функциональным признакам. Такой подход позволяет более рационально распределить всю совокупность функций, реализуемых в ГПС, между отдельными частями системы.
Так как функциональные подсистемы в совокупности должны обеспечить достижение цели всей системы, то связи между ними оказываются значительными, что затрудняет практическую разработку подсистем ГПС. В связи с этим формирование подсистем должно исходить из следующего основного принципа: подсистема должна решать свой круг задач, возникающих в процессе ее деятельности; иметь внешние входы и выходы, свою цель функционирования, т. е. обладать свойствами системы. Такой подход к формированию функциональных подсистем делает их в значительной степени автономными по связям различного вида, что существенно упрощает разработку не только функциональной части ГПС, но и обеспечивающей части.
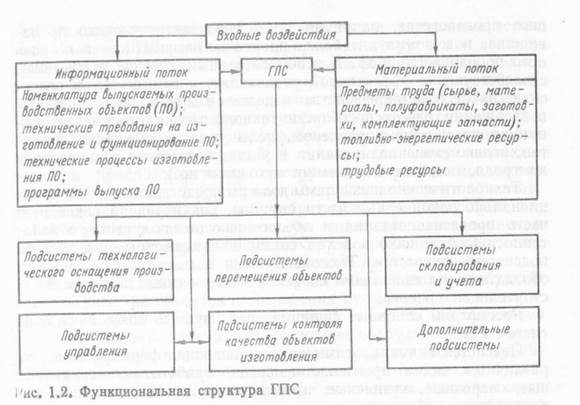
Состав функциональных подсистем имеет существенные различия в зависимости от класса изготовляемых объектов в ГПС. Однако можно выделить основной состав подсистем функциональной части ГПС (рис. 1.2).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.