|
скорость |
|
|
|
|
|
|
|
|
отрезок на плане |
Pa |
ba |
Pb |
Pc |
cb |
dc |
Pd |
План ускорений строим для одного из положений механизма, соответствующих рабочему ходу. Выбираем в качестве исследуемого положение механизма № 5.
Определяем линейные скорости выделенных точек в 5-м положении механизма.
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
![]()
Определяем угловые скорости звеньев в 5-м положении механизма.
 рад/с;
рад/с;
 рад/с;
рад/с;  рад/с;
рад/с;
 рад/с.
рад/с.
В дальнейших расчетах
используем среднее арифметическое от полученных значений:  рад/с.
рад/с.
 рад/с.
рад/с.
Определяем значения нормальных ускорений, необходимые для построения плана ускорений
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Отрезок Pa
на плане ускорений, соответствующий ускорению ![]() ,
принимаем равным 100 мм. Определяем масштаб плана ускорений
,
принимаем равным 100 мм. Определяем масштаб плана ускорений
 .
.
Определяем длины отрезков нормальных ускорений на плане ускорений
 ;
;
 ;
;
 ;
;
 ;
;
 .
.
Положение точки b на плане ускорений определяем, решив графически следующую систему векторных уравнений:
![]() ;
;
![]() .
.
Положение точки с на плане ускорений определяем путем графического решения следующей системы векторных уравнений:
![]() ,
,
![]() .
.
Составляем соответствующую пропорцию и определяем расстояния Pc и cb на плане ускорений.
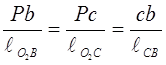 ,
,
 мм,
мм,
 мм.
мм.
Определяем численные значения ускорений центров масс звеньев, касательные ускорения, ускорение ползуна, а также угловые ускорения звеньев. Для расчетов линейных ускорений используем следующую формулу:
![]() ,
(2)
,
(2)
где ![]() – отрезок на плане ускорений, соответствующий
ускорению
– отрезок на плане ускорений, соответствующий
ускорению ![]() , мм.
, мм.
Для уменьшения объема пояснительной записки расчет линейных ускорений сводим в таблицу 4.
Таблица 4 – Расчет величины линейных ускорений
|
Ускоре-ние |
|
|
|
|
|
|
|
|
|
|
Длина на плане, мм |
39,5 |
16 |
50 |
170 |
158 |
15 |
130 |
73 |
8 |
|
модуль ускорения, м/с2 |
33,18 |
13,44 |
42 |
142,8 |
132,7 |
12,6 |
109,2 |
61,32 |
6,72 |
Угловые ускорения звеньев
 ;
;
 ;
;
 ;
;
 ;
;
В дальнейших расчетах будем использовать среднее арифметическое от полученных значений
 рад/с2;
рад/с2;
 .
.
3. Динамический анализ механизма
3.1 Расчет приложенных к звеньям механизма активных сил и инерционных нагрузок
На свободном месте
чертежа изображаем механизм в 5-м, исследуемом положении. Масштаб выбираем
произвольно. В данном случае выбран масштаб  . Для
исследуемого положения механизма определяем действующие на звенья активные силы
и инерционные нагрузки.
. Для
исследуемого положения механизма определяем действующие на звенья активные силы
и инерционные нагрузки.
Масса звена определяется по формуле
![]() ,
(3)
,
(3)
где q – удельная масса звена, кг/м. В соответствии с заданием q= 20 кг/м.
Силу тяжести, приложенную в центре масс звена, определяем по формуле
![]() ,
(4)
,
(4)
где g – ускорение свободного падения, g= 9,81 м/с2.
Главный вектор сил инерции звена, приложенный в его центре масс и направленный в сторону, противоположную направлению ускорения центра масс, определяется по формуле
![]() ,
(5)
,
(5)
Момент инерции массы звена относительно центра масс
 , (6)
, (6)
Момент сил инерции звена
![]() ,
(7)
,
(7)
Момент инерции массы звена 3 относительно его центра масс, находящегося в точке пересечения медиан, определяем при помощи теоремы Гюйгенса – Штейнера.
![]() ,
(8)
,
(8)
где ![]() – момент инерции массы
стержня, входящего в состав звена, относительно оси, проходящей через его центр
масс,
– момент инерции массы
стержня, входящего в состав звена, относительно оси, проходящей через его центр
масс, ![]() ;
;
m – масса звена, кг;
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.