|
№№ |
Наименование |
Использование |
Примечание |
|
11 |
Имитация нагрузки |
База паспортных данных двигателя / Ввести данные |
|
|
22 |
Пополнение списка двигателей |
База паспортных данных двигателя /Добавить данные |
|
|
3 |
Ввод данных |
База данных ручного режима, База данных автоматического режима /Ввести данные |
|
|
Расчет в выбранном режиме (Косвенное векторное управление) |
База данных ручного режима, База данных автоматического режима /Рассчитать параметры, построить графики |
||
|
5 |
Вызов helpсправки |
База help-справки / Ввести вопрос, просмотреть ответ |
3.3.1 Алгоритм «Имитация нагрузки»
Имитация нагрузки подразумевает автоматический режим расчета при определенных параметрах выбранного типа двигателя и происходит по следующему алгоритму:
1. Задается вектор момента двигателя
2. Задается время конкретным значением или промежутком времени, который разбивается на интервалы, через которые производится автоматический расчет.
3. Определяются выходные параметры и строятся графики зависимостей.
3.3.2 Алгоритм «Пополнение списка двигателей»
Пополнение списка двигателей подразумевает добавление новых типов двигателей администратором в уже имеющийся список и происходит по следующему алгоритму:
1. Просматриваются существующие типы двигателей.
2. Если вновь вводимого типа двигателей нет в списке, то новый двигатель добавляется в список.
3. Если вновь вводимый тип двигателя уже существует, то выдается сообщение о существовании такого типа двигателя.
3.3.3 Алгоритм «Ввод данных»
Ввод данных подразумевает введение новых параметров входных переменных в соответствии с выбранным режимом управления и происходит по следующему алгоритму:
1. Ввод данных с клавиатуры.
2. Вычисление необходимых параметров.
3.3.4 Алгоритм «Расчет в выбранном режиме (Косвенное векторное управление)»
Расчет в выбранном режиме управления подразумевает расчет необходимых параметров в ручном или автоматическом режиме управления и происходит по следующему алгоритму:
1. Выбор режима управления.
2.
Задаемся желаемым значение величины
потокосцепления ротора ![]() в
установившемся режиме и определяем заданное значение намагничивающей составляющей
в
установившемся режиме и определяем заданное значение намагничивающей составляющей
![]() вектора потока статора
для установившегося
вектора потока статора
для установившегося
 (1)
(1)
3.
Задаемся желаемым значением
электромагнитного момента М, в переходном процессе и определяем заданное
значение моментной составляющей ![]() вектора потока
статора
вектора потока
статора
 (2)
(2)
4. Вычисляем заданное электрическое абсолютное скольжение
 (3)
(3)
5.
определяем электрический угол ![]() ,
поворота координатных осей х-у относительно неподвижных осей
,
поворота координатных осей х-у относительно неподвижных осей
6.
определяем заданные значения
напряжений ![]() и
и ![]() соответствующие
заданным значениям токов
соответствующие
заданным значениям токов
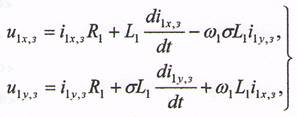 (4)
(4)
7. определяем амплитуду фазного напряжения на выходе преобразователя частоты
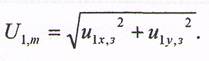 (5)
(5)
Заметим, что амплитуда напряжения будет одинаковой в системе координат х-у и а-b.
При рассмотрении установившегося режима производные в (4) и (5) обращаются в нуль;
8.
разделив напряжения (5) на
коэффициент передачи ![]() в
системе управления, получим заданные управляющие напряжения
в
системе управления, получим заданные управляющие напряжения
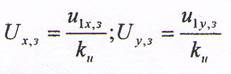 (6)
(6)
9. постоянного тока, которые с помощью обратного координатного преобразования формируют управляющие сигналы переменного тока в осях

Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.