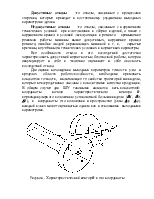
начала характеристического вектора и угла его наклона Dj. Изменение координаты DX при вращении шпинделя определяет форму обработанной поверхности в поперечном сечении (см. рисунок) и может быть оценено одним или несколькими членами
Рисунок - Связь траекторий опорных точек и формы поверхности детали: а - сечение детали, б – траектория опорной точки шпинделя разложения круговой траектории опорной точки шпинделя в ряд Фурье, вида:
DR(j)=C0 + SCk ×cos(kj+jk) , где Ck - амплитуда k-ой гармоники;
jk - начальная фаза;
C0 - значение погрешности размера, равное:
![]()
![]()
 .
.
Первый член разложения C1 × cos (j + j) выражает эксцентриситет обработанной поверхности, причем C1 численно равно величине эксцентриситета. Второй член ряда выражает овальность профиля, третий - трехгранку и т.п. Начиная с k = 15 члены ряда выражают волнистость обработанной поверхности, а члены ряда с k = 46 шероховатость обработанной поверхности. Для наглядности сведем параметры круговой траектории в таблице 1.
Таблица 1 - Выходные параметры круговой траектории ШУ
|
Выходной Параметр |
Характеристика параметра траектории |
Отклонения геометрических параметров обработанной детали |
|
X0=C0 X1=C1cos(f) X2=C2cos(2f)
X3=C3cos(3f)
Xk=Ckcos(kf)
Xm=Cmcos(mf) Xn=Cncos(nf) |
Смещение траектории Эксцентриситет вращения 2-ой член разложения Фурье 3-ой член разложения Фурье K-й член разложения Фурье m » k n » m |
Точность радиального размера Точность расположения поверхностей Овальность Трехгранность К - гранностьВолнистость Шероховатость |
Таким образом, область состояния параметров качества шпинделя полностью определяется вектором вибрации опорной точки, расположенной на базовой поверхности шпинделя. Координата DZ определяет точность торцовых поверхностей, а изменение угла Da влияет на конусность или другие погрешности формы обработанной цилиндрической поверхности в продольном направлении (по оси Z).
Концептуальная схема, представленная на рисунке отражает взаимовлияние процессов, имеющих место в трибомеханической системе ШУ при его работе.
Исходные данные Выходные данные
Конструктивные:
|
|
Внешние:
|
|
Технологические:
|
|||
|
|||
|
|
|||
|
|||
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ ОБЛАСТЕЙ
СОСТОЯНИЯ ПАРАМЕТРОВ КАЧЕСТВА ШПИНДЕЛЬНЫХ УЗЛОВ ПРИ ДЕЙСТВИИ БЫСТРОПРОТЕКАЮЩИХ
ПРОЦЕССОВ И ПРОЦЕССОВ СРЕДНЕЙ СКОРОСТИ
Математическая модель колебаний шпинделя на опорах
качения
Расчетная схема ШУ отражает следующие допущения, принятые при разработке модели колебаний шпинделя:
Рисунок 1 - Расчетная схема ШУ
- рассматриваются изгибные и продольные колебания шпинделя, при дискретизации каждой узловой точке соответствует три обобщенных перемещения, матрица масс ШУ принимается диагональной;
- шпиндель представляется в виде балки переменного сечения, материал которой подчиняется закону Гука на упруго-демпфирующих опорах с вязким трением, величина, силы демпфирования пропорциональны относительной скорости вибрации колец подшипников; - корпус ШУ представлен в виде эквивалентного стержневого конечного элемента;
- обрабатываемая деталь представлена в виде конечного элемента - стержня;
- устройство зажима заготовки моделируется посредством добавления жесткости и демпфирования устройства в узле стыковки обрабатываемой детали и шпинделя;
- источниками вибровозмущений являются дефекты изготовления и сборки подшипников, а также дисбалансы шпинделя и смонтированных на них деталей;
- ременная передача, передающая вращение шпинделю, рассматривается как упругая связь;
- учитывается наличие различного рода отверстий, шпоночных пазов и т.п. в теле шпинделя посредством неодинаковых осевых моментов инерции;
- вибровозмущения, генерируемые приводом шпиндельного узла, учитываются посредством задания возмущения от привода в узле, расположенном в месте крепления приводной передачи;
- сила резания задается в координатах относительно базовой поверхности шпинделя.
Модель ШУ составляем на основе метода конечных элементов. Шпиндель при этом разбивается на n конечных элементов, которые связаны между собой в узлах. Перемещения узлов, каждый из которых при принятых допущениях имеет 5 степеней свободы, принимаются за обобщенные координаты системы. Общее число степеней свободы при этом равно N = 5 (n + 1).
Выражения для возмущающих сил от подшипников - FiП , соответствующих выбранным обобщенным координатам можно представить в следующем виде :
Fin = -Fiупр - Fiдемп + Fiц + Fiт , i = 1, ...5 , где Fiупр - силы и моменты, обусловленные упругими свойствами подшипника;
Fiц - возмущающие силы и моменты, обусловленные действием центробежных сил на тела качения;
Fiт - силы и моменты, обусловленные технологическими погрешностями;
Fiдемп - демпфирующие силы и моменты.
Значения спектральных амплитуд возмущающих сил от погрешностей изготовления шарикоподшипника и частот, на которых они проявляются, приведены в табл.1.
Таблица 1- Амплитудный спектр радиальных вибровозмущений, генерируемых шарикоподшипником
|
Дефект, вызывающий возмущения |
Номергармоники элемента |
Частота возмущений |
Амплитуда возмущения |
|
Волнистость наружного кольца |
l=kn+1 l=kn-1 k=1,2,... |
(l-1)wн (l+1)wн |
0,5Kzktg2(t)al |
|
Волнистость внутреннего кольца |
x=kn+1 k=0,1,... x=kn-1 k=1,2,... |
xwв+wн xwв-wн |
0,5Kzktg2(t)ax |
|
Волнистость наружного и внутреннего колец |
l+x=kn-1 l+x=kn+1 |l-x+1|=kn k=1,2,... |l-x-1|=kn kn=0,1,2,... |
|lwн-xwв+wн| |lwн-xwв-wн| lwн+xwв+wн lwн+xwв_wн |
Kzktg3(t) ------------axal 8s |
|
Волнистость шариков |
p=2,4,6... |
pwш±wн |
¾ Ö2Kzktg2(t) ----------------ap ¾¾ 6Ö2pn cos(t) |
|
Разноразмерность шариков (первое приближение) |
p=0 |
wн |
2Kzktg2(t) ----------------ap=0 ¾ 6Ö2n cos(t) |
В табл.1 n - число тел качения;
t - угол контакта;
s - геометрический осевой натяг;
Kz - осевая жесткость шарикоподшипника;
wн,wв,wш - частоты вращения сепаратора относительно наружного, внутреннего кольца и шариков вокруг собственной оси;
p - номер гармоники разложения в ряд Фурье радиуса шариков;
ap - наиболее вероятное значение амплитуды p - й гармоники радиуса шарика для партии ШП;
l,x,al,ax - номера и амплитуды гармоник приведенных погрешностей макрогеометрии наружного и внутреннего колец.
Геометрическая интерпретация гармоник погрешностей дорожек качения колец, дается на рис. (2) на примере наружного кольца.
дорожек качения колец шарикоподшипника
Для расчетного определения амплитудных спектров погрешностей колец и тел качения можно использовать метод, основанный на аппроксимации спектров гиперболическими линиями регрессии. Характеристики дефектов сборки шарикоподшипников, даны в табл. 2.
Таблица 2 - Дефекты сборки шарикоподшипников
|
Вид дефекта |
Амплитуда первой гармоники |
Амплитуда второй гармоники |
|
Перекос aq |
Rqsinaqcos(p/2-b0) |
Rq/2(1-cosaq) |
|
Несоосность Dq |
Dq |
- |
Обозначения: Rq- расстояние от оси вращения подшипника
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.