 (24)
(24)
Как найти ![]() и
и ![]() ?
?
Если профиль дороги синусоидальный, то получим
q = qosinpt (25)
где P - круговая частота колебаний;
t - время;
qo- амплитуда длины неровности.
Тогда первая производная от q, по времени будет равна
![]() (26)
(26)
Подставив выражения (25) и (26) в выражение (24), получим
 (27)
(27)
Или после преобразований получим
 (28)
(28)
где ![]() - введенное обозначение;
- введенное обозначение;
φ - начальная фаза колебаний - смещение по фазе.
Введем другое обозначение – коэффициент
Окончательно дифференциальное уравнение вынужденных колебаний будет иметь вид
![]() (29)
(29)
Решение такого линейного неоднородного дифференциального уравнения дается в справочнике по высшей математике.
Решение будет иметь вид
![]() (30)
(30)
где Zo - начальная амплитуда вынужденных колебаний;
δ - начальная фаза колебаний подрессоренной массы.
Здесь
где hр - коэффициент затухания.
Другие производные перемещения получают перемножением на частоту возмущения
Ż = ZP
(30); и ![]() (31)
(31)
Непосредственно по уравнениям амплитуд выявить влияние основных дорожных условий на параметры плавности хода, а также сравнить воздействие конструктивных факторов у разных автомобилей затруднительно.
Поэтому более наглядное представление об этом могут дать амплитудно-частотные характеристики.
Амплитудно-частотной
характеристикой называется графическая зависимость между частотой вынужденных
колебаний (при данной
длине волны она пропорциональна скорости движения автомобиля V) с одной стороны и амплитудами колебаний (Zmax и φmax) и ускорениями корпуса (![]() и
и ![]() ) с другой.
) с другой.
Таким образом, для построения амплитудно-частотных характеристик нам необходимо знать: максимальные амплитуды колебаний и ускорения в зависимости от скорости движения автомобиля, высоты и длины неровности.
Эти величины могут быть определены расчетом или экспериментально.
При расчетном определении параметры подсчитывают по формулам, задавшись высотой неровности h и длиной волны l.
Амплитудно-частотная характеристика имеет вид, приведенный на рис. 7.
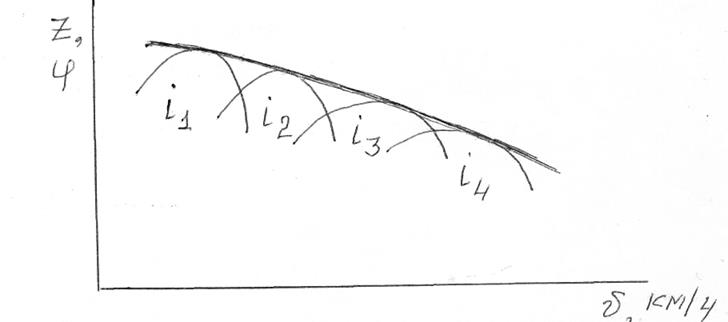
Рис. 7. Амплитудно-частотная характеристика
ЗАКЛЮЧЕНИЕ
Таким образом, в одной лекции в обобщенном и сконцентрированном виде мы рассмотрели основные вопросы плавности хода автомобиля: виды колебаний автомобиля, параметры оценки плавности хода, а также выводом получили дифференциальные уравнения свободных и вынужденных колебаний автомобиля. Мы также ознакомились с характеристиками различных типов упругих элементов.
Рассмотренные вопросы являются ключевыми вопросами плавности хода автомобиля и позволяют понимать процессы, происходящие в подвеске автомобиля при его движении.
НАЧАЛЬНИК КАФЕДРЫ № 8
доцент, кандидат технических наук
полковник Ю.МИХАЛЕВ
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.