машины для транспортировки жидких сред и газов, а так же для сжатия газов.
По области применения: - машиностроительные;
- металлургические;
- горные;
- строительные;
- судовые и т.д.
по характеру технологического процесса: - мех-мы циклического (непрерывного) действия, рабочие процесс которых состоит из повторяющихся однотипных циклов.
- механизмы непрерывного действия.
1.МЕХАНИКА, УСТАНОВИВШИЙСЯ РЕЖИМ И УСТОЙЧИВОСТЬ РАБОТЫ ЭЛЕКТРОПРИВОДА.
Установившейся режим – скорость движения неизменна или равна нулю.
Динамический (неустановившейся) – характеризуется изменением скорости.
Условием установившегося вращательного движения является равенство моментов двигателя и приведенного момента нагрузки М=Мс. . Проверка выполнения этого условия обычно осуществляется графически с помощью механических характеристик двигателя и исполнительного органа.
Механической характеристикой двигателя вращательного движения называется зависимость угловой скорости его вала от развиваемого им момента w(М). Различают естественную и искусственные характеристики двигателей.
 |
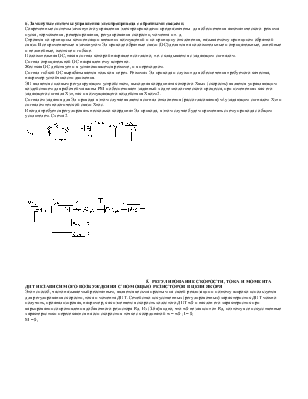
Естественной называется механическая характеристика двигателя, которая соответствует основной схеме включения двигателя, номинальным параметрам питающего напряжения и отсутствию в электрических цепях двигателя дополнительных элементов. На рис. 1.3 показаны естественные характеристики наиболее распространенных двигателей вращательного движения: / — двигателя постоянного тока независимого возбуждения; 2 — двигателя постоянного тока последовательного возбуждения; 3 — асинхронного двигателя; 4 — синхронного двигателя.
Искусственные или, как их еще часто называют, регулировочные характеристики получаются в том случае, когда изменяются параметры питающего двигатель напряжения или в цепи обмоток двигателя вводятся дополнительные элементы (резисторы, конденсаторы и т. д.), а также при включении двигателя по специальным схемам. Искусственных характеристик у двигателя может быть много.
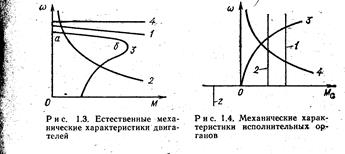
По аналогии с двигателем механической характеристикой исполнительного органа рабочей машины называется зависимость скорости его движения от момента или усилия, т. е. зависимость wи,о(Ми,о) или v и.о.(Fи,0). На рис. 1.4 показаны приведенные к валу двигателя механические характеристики w(Мс) некоторых исполнительных органов.
1-подъемный механизм, 2- транспортер, 3- вентиляторы, дымососы, компрессоры, насосы, 4- гл. двиг-ль металообрабатыв.станка.
для оценки крутизны мех.хар-ки дв-ля вводится понятие жесткости
β = dM \dw , у СД абсолютно жесткая
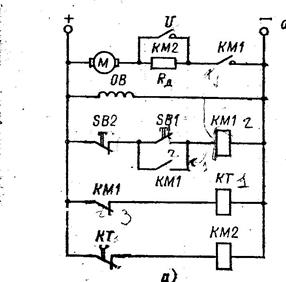
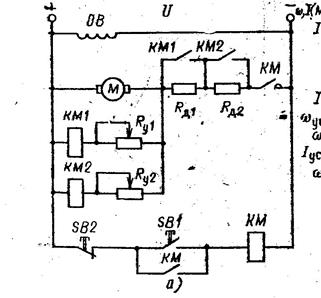
2.Принципы и схемы автоматического управления ДПТНВ.
Принципы построения схем: -по времени
- по моменту (току)
- по скорости (ЭДС)
U=E+I•R,
E=k•Ф•w, по времени
по времени
по ЭДС
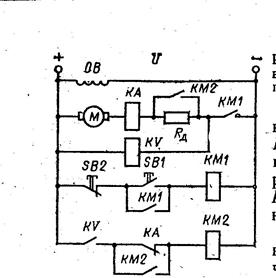
по току
4. Механическая характеристика и способы регулирования частоты вращения дв-ей перемен. тока.
АД
Частотное регулирование.
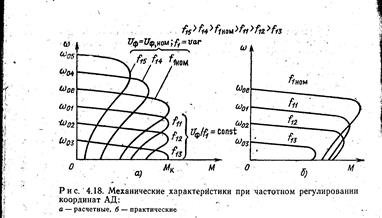
наиболее перспективный способ. Основан на выражении w = 2πf/р, где f – частота питающей сети, р – число пар полюсов.
 Полученные характеристики обладают высокой жесткостью,
обеспечивает регулирование в широком диапазоне. Сложность конструкции, использование
преобразователей частоты.
Полученные характеристики обладают высокой жесткостью,
обеспечивает регулирование в широком диапазоне. Сложность конструкции, использование
преобразователей частоты.
Реостатное регулирование.
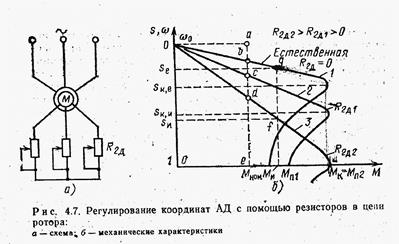
Скорость идеального ХХ не изменяется, максимальный (критический) момент дв-ля Мк также остается неизменным. Диапазон регулирования 2-3, т.к. снижается жесткость характеристики и увеличиваются потери.
Статор.
Пусковой момент уменьшается при увеличении R.
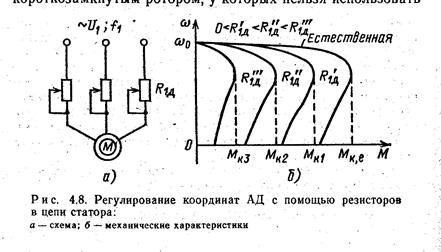
характеристики мало пригодны для регулирования скорости : обеспечивают небольшой диапазон регулирования, жесткость снижается, низкая экономичность.
Изменение числа пар полюсов.
Изменение числа пар полюсов производится за счет переключений в обмотке статора. Только ступенчатое регулирование.
Изменение числа пар полюсов достигается когда на статоре имеются две или несколько не связанные друг с другом обмотки, или за счет изменения схемы соединения статорной обмотки.
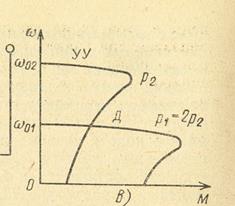
Экономичность регулирования (не сопровождается выделением больших потерь энергии). Снижение W, увеличение М.
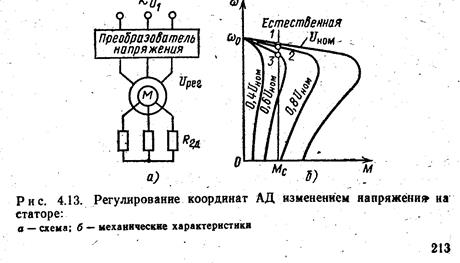
Изменением U
по мере снижения U резко снижается Мкр АД и его перегрузочная
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.