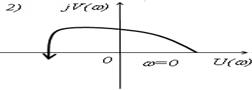
134) Характеристическое уравнение замкнутой системы четвертого порядка. Какой вид должна иметь АФЧХ для того, чтобы системы согласно критерию Михайлова была устойчива?
 |
135) Характеристическое уравнение замкнутой системы пятого порядка. Какой вид должна иметь АФЧХ для того, чтобы системы согласно критерию Михайлова была устойчива?
 |
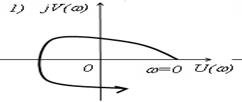
136) Характеристическое уравнение разомкнутой системы пятого порядка. Какой вид должна иметь АФЧХ для того, чтобы системы согласно критерию Михайлова была устойчива? 3
 |
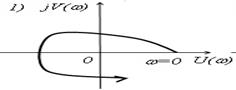
137) Характеристическое уравнение разомкнутой системы четвертого порядка. Какой вид должна иметь АФЧХ для того, чтобы системы согласно критерию Михайлова была устойчива?
 |
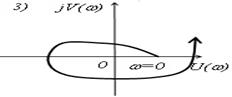
138) Характеристическое уравнение разомкнутой системы третьего порядка. Какой вид должна иметь АФЧХ для того, чтобы системы согласно критерию Михайлова была устойчива?
 |
139) Характеристическое уравнение замкнутой системы второго порядка. Какой вид должна иметь АФЧХ для того, чтобы системы согласно критерию Михайлова была устойчива?такая АФЧХ на рисунке отсутствует;
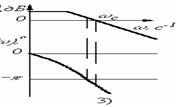
140) Какие ЛАЧХ характеризуют систему как устойчивую?
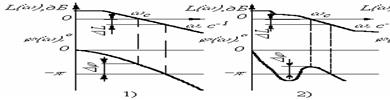 |
141) Какие ЛАЧХ характеризуют систему как неустойчивую?
 |
142) Как называются показатели качества, определяемые непосредственно по кривой переходного процесса?
прямые;
143) На какие группы делятся косвенные методы оценки качества управления линейных САУ?
корневые, интегральные и частотные;
144) Переходные процессы, возникающие в системах при скачкообразных воздействиях делятся на:
монотонные, апериодические и колебательные;
145) Расшифруйте типы переходных процессов изображенных на графиках
1 - монотонный, 2 - апериодический, 3 - колебательный;
146) Какие показатели качества управления можно определить по кривой переходного процесса?
время регулирования, перерегулирования, частоту колебаний, число колебаний, время достижения первого максимума, время нарастания переходного процесса, декремент затухания;
147) Какие показатели качества можно определить по данному АЧХ?
показатель колебательности (М), резонансную (собственную) частоту (wр), полосу пропускания системы (wo), частоту среза (wcр), запасы устойчивости по модулю и по фазе;
148) Какие показатели качества можно определить по переходной характеристике?
время регулирования, перерегулирования, частоту колебаний, число колебаний, время достижения первого максимума, время нарастания переходного процесса, декремент затухания;
149) Как определить время регулирования для данной характеристики?
минимальное время, по истечении которого регулируемая
величина будет оставаться близкой к установившемуся значению с заданной точностью:![]() ;
;
150) Как определить декремент затухания для данной характеристики? отношению модулей двух смежных перерегулирований:
![]()
151) Перерегулирование по кривой переходного процесса определяется по формуле:
![]()
152) Декремент затухания по кривой переходного процесса определяется по формуле:
![]()
153)
Частота колебаний по кривой
переходного процесса определяется по формуле: ![]()
154) Чем определяется число колебаний в системе автоматического управления? временем регулирования;
155) Какое число колебаний допускают при проектировании САУ? верны все выше перечисленные ответы
156) Какие показатели качества можно определить по данной АЧХ?
 |
157) Какие показатели качества можно определить по характеру расположения корней на комплексной плоскости?
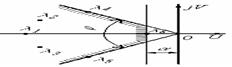 |
158) Какими величинами характеризуется распределение корней на комплексной плоскости?
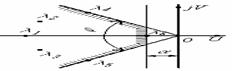 |
159) Как зависит время регулирования от величины a? чем больше a, тем меньше время регулирования
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.