Автоматизація технологічного виробництва - форма організації при якій технологічні операції виконуються автоматично за допомогою спеціальних технічних засобів без особистої участі людини. Підвищення ефективності економіки народного господарства нерозривно пов'язане із впровадженням в усі його сфери досягнень науково-технічного прогресу, одним з найважливіших елементів якого є автоматизація технологічних процесів.
Автоматизація технологічного виробництва представляє:
- контроль технологічних параметрів процесу;
- автоматичне регулювання процесу;
- автоматизоване керування процесом;
- захист від аварійних режимів, сигналізацію, відключення від номінальних режимів;
- систему автоматизації, що передбачає захист навколишнього середовища.
Базовою системою будь-якої сучасної автоматизованої системи керування технологічним процесом (АСКТП) є система автоматичного контролю, що дозволяє одержувати вимірювальну інформацію про режимні параметри процесів, а також про параметри якості сировини, проміжних і кінцевих продуктів.
Ефективність роботи системи автоматичного контролю визначається ефек-тивністю роботи всієї АСКТП. Система автоматичного контролю дозволяє спростити алгоритми та структуру АСКТП: керування по показниках якості сировини та напівпродуктів, зменшити її вартість і поліпшити якість продукції.
Науковою основою систем автоматичного контролю є метрологія та фізичні причини вимірів параметрів технологічних процесів, а технологічною базою цих систем служать засоби вимірів та перетворень відповідних параметрів. У зв'язку із цим необхідно автоматизувати наступні параметри: температура, витрата, рівень, в'язкість.
У даному виробництві обрані наступні параметри керування: у бісерному млині – температура та рівень; у дисольвері - в'язкість, а також регулюється витрата та рівень.
8.2 Опис контурів у системі автоматизації
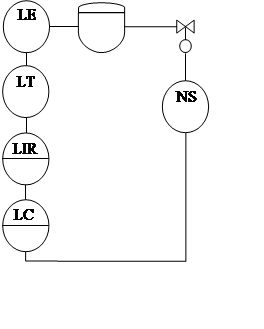
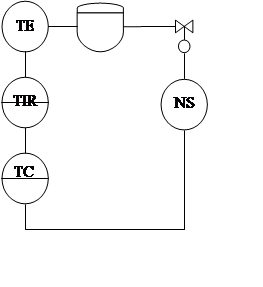 8.2.1 Регулювання температури в бісерному млині
8.2.1 Регулювання температури в бісерному млиніВимір температури в апараті виробляється термометрами опору типу ТСП-04ЕК, межі виміру якого від 50
до + 200°С. Принцип дії яких заснований на зміні опору провідників (поз. 1–1). Сигнал з датчика надходить на вторинний прилад – автоматичний самописний міст (поз. 1 – 2), принцип дії якого заснований на зрівноважуванні сигналу датчика відомим сигналом. Вихідний
 струмовий сигнал із вторинного
приладу надходить на вхід електронного регулятора системи контур
БР-1
струмовий сигнал із вторинного
приладу надходить на вхід електронного регулятора системи контур
БР-1
(поз. 1 – 3). Цей електронний регулятор забезпечує перехід з ручного керування на автоматичне, а також завдання величини регульованого параметра. Вироблене регулятором керуючий вплив надходить на електронний підсилювач В-101 (поз. 1 – 4). Цей підсилювач управляє роботою електричного виконавчого механізму. Інші контури керування температурою регулюють аналогічно
 8.2.2
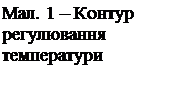
Регулювання витрати
8.2.2
Регулювання витрати
Вимір витрати здійснюється методом змінного перепаду тиску. Для цього на технологічному трубопроводі встановлюється звужуючий пристрій
(діафрагма) (поз. 9 – 1). Перепад тиску на діафрагмі вимірюється перетворювачем тип «Сапфір-22 ДД»
 (поз.9–2). Цей прилад
перетворює перепад тиску в уніфікованний струмовий сигнал, що надходить на вхід універсальний
самописний міліамперметру
(поз.9–2). Цей прилад
перетворює перепад тиску в уніфікованний струмовий сигнал, що надходить на вхід універсальний
самописний міліамперметру
КСУ-2 (поз. 9–3). Далі обмірюване значення надходить на регулятор БР-1
(поз.9– 4). Вироблений регулятором керуючий 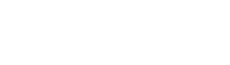 вплив
надходить на електронний
вплив
надходить на електронний
 тиристорний підсилювач ПБР-3 (поз.9–5), далі керуючий сигнал
надходить на електрозасув (поз.9–6).
тиристорний підсилювач ПБР-3 (поз.9–5), далі керуючий сигнал
надходить на електрозасув (поз.9–6).
8.2.3 Регулювання рівня
Вимір рівня в апарату виробляється за допомогою звуко-вих рівнемірів Ехо-3 (поз. 12 – 1). Принцип дії заснований на вимірі часу проходження ультразвукового сигналу про датчик до поверхні речовини й назад. Прилад має уніфі-кований струмовий вихід. Обмірюване значення надто-
 дить на КСУ-2 (поз. 12 –
2). Далі обмірюване значення надходить на регулятор Р-25
(поз. 12–3). Вироблений регулятором керуючий вплив
надходить на електронний
дить на КСУ-2 (поз. 12 –
2). Далі обмірюване значення надходить на регулятор Р-25
(поз. 12–3). Вироблений регулятором керуючий вплив
надходить на електронний
 тиристорний підсилювач ПБР-3 (поз.
12 - 4), далі керую- чий сигнал надходить на
електродвигун (поз. 12 - 5) насосу (поз.14) .
тиристорний підсилювач ПБР-3 (поз.
12 - 4), далі керую- чий сигнал надходить на
електродвигун (поз. 12 - 5) насосу (поз.14) .
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.