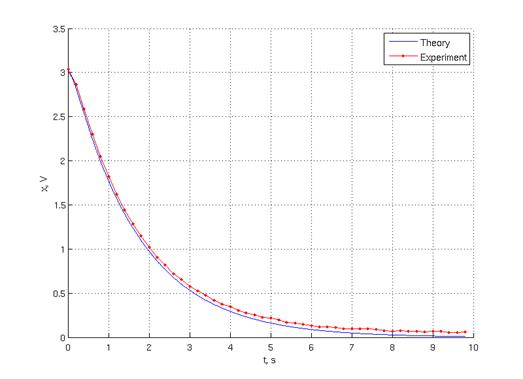
Рис. 24. График зависимости x(t)
 |
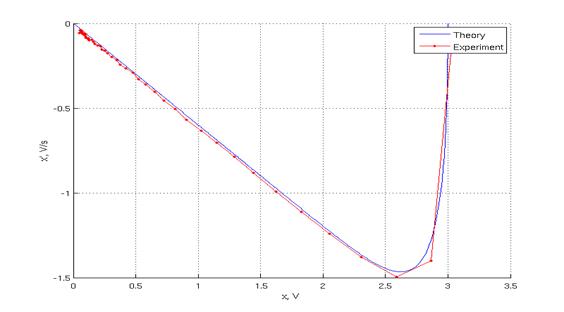
Рис. 26. Фазовая характеристика
5. Вывод
В данной лабораторной работе с помощью АВК-31 моделировалось поведение объекта, заданного линейным дифференциальным уравнением второго порядка. Эксперименты показали, что результаты моделирования довольно точно совпадают с теоретическими. Имеющиеся расхождения вызваны прежде всего отклонением аналоговых элементов от их номиналов. Также необходимо заметить, что как только коэффициент в линейном дифференциальном уравнении перед x', отвечающий за демпфирование колебаний становится равен нулю, колебания не затухают. При увеличении коэффициента демпфирования колебания затухают все сильнее, что при определенном значении приводит к апериодическому процессу. В точке бифуркации система находится в неопределенном состоянии, при котором сложно спрогнозировать колебательность системы.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.