На основі вищезазначеного виходить, що для обробки валика потрібні формоутворюючі рухи Фv(В1) та ФS(П2). Ці рухи можуть бути створені складною кінематичною групою, яка становить сполучення двигуна, внутрішнього та зовнішнього зв’язків.
Розглянемо формоутворюючий рух ФV(В1):
Будуємо кінематичну групу для отримання цього формоутворюючого руху.
В1- утворюється обертальною кінематичною парою : шпиндель 3, корпус 4. Для того щоб отримати цей рух потрібно джерело руху, джерелом є електродвигун Д. Щоб передати рух від джерела до потрібно зв'язати точку 9 з любою точкою внутрішнього зв’язку, такою точкою є точка 10. Щоб формоутворюючий рух здійснювався з певними параметрами, нам потрібно розмістити органи настроювання. Швидкість забезпечується органом настроювання іV.
Таким чином отримана кінематична група, яка забезпечує отримання формоутворюючого руху ФV(В1).
Запишемо структурні рівняння кінематичних зв'язків:
- внутрішній зв'язок: 3→4
- зовнішній зв'язок: Д→9→Р→іV→10→7→В1
Розглянемо другий формоутворюючий рух ФS(П2):
Будуємо кінематичну групу для отримання цього формоутворюючого руху.
П2- утворюється поступовою кінематичною парою: супорт 5, направляючими 6.
Для того щоб отримати цей рух потрібно зв'язати джерело руху (точку 9) з любою точкою внутрішнього зв’язку (точкою 8). Щоб формоутворюючий рух здійснювався з певними параметрами, нам потрібно розмістити органи настроювання. Подача забезпечується органом настроювання іS.
Таким чином отримана кінематична група, яка забезпечує отримання формоутворюючого руху ФS(П2).
Запишемо структурні рівняння кінематичних зв'язків:
- внутрішній зв'язок: 5→6
- зовнішній зв'язок: Д→9→Р→іV→10→8→t→П2
Неважко помітити, що верстат по змісту формоутворюючої структури підлягає до класу Е 2.2
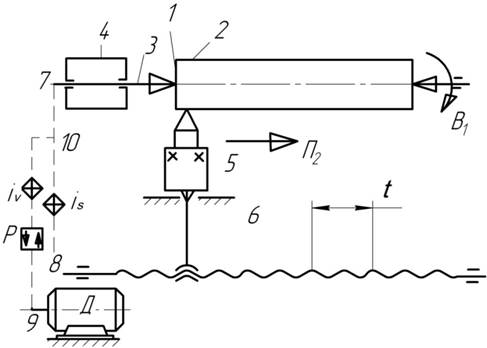
Рис. 2.1 Структурна схема верстата.
3. РОЗРОБКА КІНЕМАТИЧНОЇ СХЕМИ ВЕРСТАТА
Основою для розробки кінематичної схеми верстата є отримана структурна схема рис. 2.1. Умовні кінематичні зв'язки, виконані пунктиром, на структурній схемі необхідно замінити реальними механізмами послідовно з'єднати в кінематичні ланцюги.
Механізм головного руху згідно виду структурної схеми повинен містити електродвигун М, реверсивний механізм Р та орган настрою іV. Орган настрою іV повинен бути представлений коробкою швидкостей, яка має структурну формулу 10=2∙5 і містить три групи передач та забезпечує отримання восьми ступенів частот обертання шпинделя n1-n10.
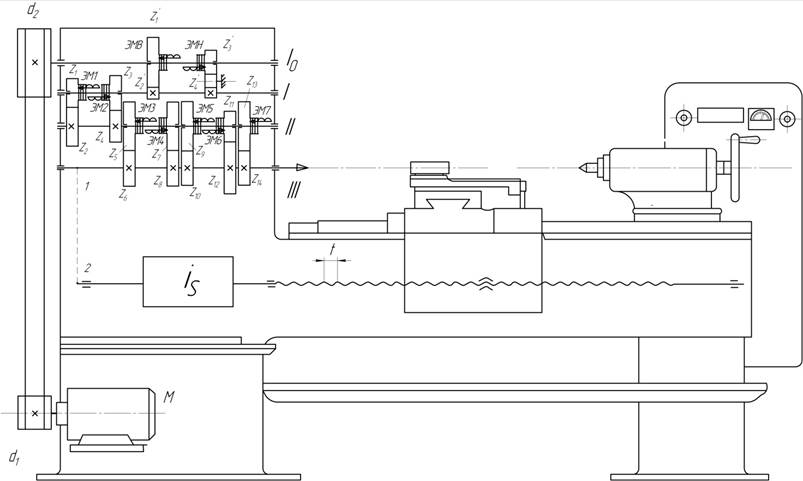
Рис. 3.1 Кінематична схема верстата
Оскільки ми розробляємо верстат з автоматичним керуванням циклу робото,то відповідно розробляємо автоматичну коробку швидкостей, коробку швидкостей обертання шпинделя, яка базується на застосуванні електромагнітних муфт.
Відображає загальну тенденцію розвитку верстатів першої групи, реверсивний механізм розташуємо в коробці швидкостей. Реверсивний механізм також базується на застосуванні електромагнітних муфт. В якості джерела руху приймаємо електродвигун М.
Зв'язок 1-2 містить сукупність механізмів, які передають рух від шпинделя до ведучого валу коробки подач. Коробка передач Is.
Для передачі обертання двигуна до коробки швидкостей використовується плоско-пасова передача із шківами d1; d2.
Таки чином отримана кінематична схема верстата рис. 3.1, яка забезпечує отримання згідно завданню десяти ступенів частот обертання шпинделя.
4. КІНЕМАТИЧНИЙ РОЗРАХУНОК ПРИВОДУ ГОЛОВНОГО РУХУ
Привод головного руху повинен відрізняється максимальною простотою, містити мінімальну кількість механізмів і при цьому усі вали повинні бути розташовані паралельно один від одного. В якості органа настрою частіше всього треба використовувати коробку швидкостей, в якості механізмів коробки швидкостей використовують елементарні механізми різноманітного складу.
При проектуванні верстата завжди відоме його призначення, характер виконуємих технологічних операцій:
- розміри обробляємої деталі ;
- їх матеріали;
- особливості ріжучого інструменту;
Все це робить можливим визначити межові значення швидкостей Vmin та Vmax , які повинні забезпечувати привод і межові значення частот Nmin та Nmax.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.