Рис. 4.2.4. Зависимость tп.п. = f(N1).
Таблица 4.2.2. Параметры фильтра при различных значениях начальных условии
(N1 = 3, X = 1 В).
|
X0, В |
T, с |
|
1 |
--- |
|
2 |
0,3 |
|
4 |
0,35 |
Отметим, что при стремлении начальных условии к величине полезного сигнала
время переходного процесса стремиться к нулю ( tп.п. -> 0).
Таблица 4.2.3. Параметры фильтра при различных значениях периода дискретизации (N1 = 3).
|
T0, мс |
tп.п., с |
T, с |
|
20 |
0,22 |
0,07 |
|
50 |
0,48 |
0,15 |
|
100 |
0,7 |
0,2 |
Отметим увеличение tп.п. при увеличении T0.
Подадим на вход фильтра зашумленный постоянный сигнал:
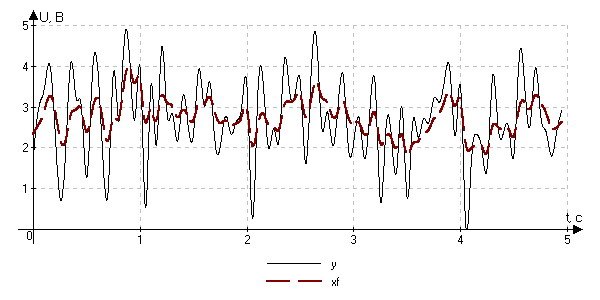
Рис. 4.2.5. Цифровая фильтрация сигнала при N1 = 3, X0 = 2,6 В, X = 2,6 В.
По сравнению с фильтром с бесконечной памятью здесь мы видим меньшую
устойчивость выходного сигнала при выбросах. Это связано с тем, что каждое новое значение имеет вес в общей сумме, равный 1/N1, то есть довольно значительный и больший, нежели все ранние результаты.
Подадим на вход фильтра синусоидальный сигнал.
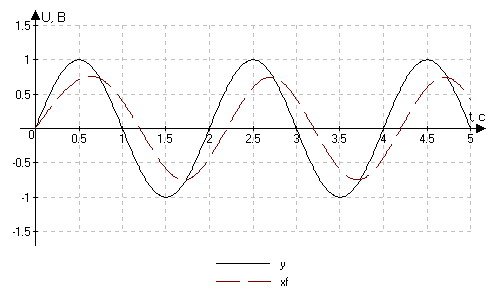
Рис. 4.2.6. Цифровая фильтрация сигнала при N1 = 3, X0 = 0.
Таблица 4.2.4. Параметры фильтра при различных значениях корректирующего коэффициента.
|
N1 |
Δφ, градусов |
|Uмакс|, В |
КФ |
|
3 |
36 |
0,75 |
0,75 |
|
5 |
45 |
0,55 |
0,55 |
|
9 |
63 |
0,35 |
0,35 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.