





















Зміст
1. Вступ............................................................................................................ 2
2. Технічне завдання....................................................................................... 3
3. Постановка задачі синтезу.......................................................................... 5
4. Побудова бажаної зворотної логарифмічної частотної характеристики.. 6
5. Побудова ЗЛАЧХ незмінної частини системи........................................... 8
6. Синтез коригувальних пристроїв............................................................... 9
7. Синтез паралельного коригувального пристрою..................................... 10
8. Перевірка стійкості внутрішнього контуру системи............................... 12
9. Перевірка стійкості системи в цілому...................................................... 13
10. Розрахунок елементів зворотних зв'язків.............................................. 15
11. Розрахунок перехідного процесу........................................................... 17
12. Висновок…………………………………………………………………….. 22
13. Література……………………………………………………………………23
Вступ
Стан будь-якого технічного пристрою характеризується однією або декількома фізичними величинами.
Сукупність дій, що визначають характер зміни вихідних величин об'єктів, називається алгоритмом функціонування.
До основних алгоритмів функціонування САК відносяться:
- підтримка постійного значення (стабілізація) керованої змінної
![]() ;
;
- зміна вихідної величини по заданому закону;
- зміна вихідної величини по заздалегідь невідомому закону.
У залежності від цього САК поділяють:
- стабілізуючі системи;
- системи програмного керування;
- системи, що стежать.
У курсовому проекті розглядається синтез системи, що стежить, зі зворотним зв'язком по швидкості і струму. Як метод синтезу застосовано метод зворотних логарифмічних частотних характеристик (ЗЛАФЧХ). Необхідність такого підходу зумовлена тим, що досліджувані системи можуть мати кілька місцевих зворотних зв'язків, що охоплюють одну й ту саму послідовність ланок. Це ускладнює рішення задачі синтезу шляхом використання прямих логарифмічних характеристик, тому що при цьому буде потрібне багаторазове використання номограми «замикання» і побудова додаткового числа ЛАФЧХ, пропорційного кількості місцевих зворотних зв'язків.
Технічне завдання
Сумарна
помилка ![]() = 0,1 град;
= 0,1 град;
Швидкість зміни задаючого впливу ![]() =20 град/с;
=20 град/с;
Прискорення зміни задаючого впливу ![]() = 9 град/с2;
= 9 град/с2;
3-я похідна зміни задаючого впливу ![]() = 10 град/с3;
= 10 град/с3;
Відношення моментів МВ/МН =0,7;
Кратність
моментів  ;
;
Передаточне число редуктора і =300;
Частота обертання N = 2000 об./хв.;
Склад незмінної частини: ЕМП-Д
Постійна
часу розгону двигуна ![]() с
с
Постійна
часу ![]() с
с
Постійна
часу ![]() с
с
Коефіцієнт
підсилення при холостому ході ![]()
![]() = 0,96 В/c-1
= 0,96 В/c-1
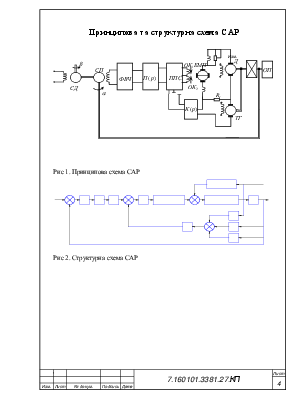
Принципова та структурна схема САР
|
|
Рис 1. Принципова схема САР |
|
|
|
Рис 2. Структурна схема САР |
Постановка задачі синтезу.
У тому випадку, якщо в якості вихідних даних задана принципова схема системи і параметри її основних елементів, а також вимоги до динамічних властивостей, постановка задачі може бути сформульована в такий спосіб: з метою поліпшення показників якості керування у визначені місця системи включаються пристрої, називані коригувальними.
Коригувальні пристрої можуть бути:
- послідовні
- паралельні.
Як основний метод синтезу в курсовому проекті застосовується метод зворотних логарифмічних частотних характеристик.
Сутність цього методу зводиться до слідуючого:
Нехай задана структурна схема системи, що стежить, у самому загальному виді, що містить послідовний П(р) і паралельний K(p) керуючий пристрій (КП) і незмінну частину системи A(p). Передатні функції П(р) і K(p) потрібно визначити в процесі синтезу.
Забезпечення необхідних динамічних властивостей досягається
шляхом введення в структурну схему системи паралельних коригувальних пристроїв,
що деформують ЗЛЧХ вихідної системи в істотному діапазоні частот![]() . Це обумовлено тим, що вони мають ряд
переваг у порівнянні з послідовними пристроями: зменшують вплив нелінійностей
головного кола, менш чуттєві до перешкод і зміни параметрів у процесі
експлуатації.
. Це обумовлено тим, що вони мають ряд
переваг у порівнянні з послідовними пристроями: зменшують вплив нелінійностей
головного кола, менш чуттєві до перешкод і зміни параметрів у процесі
експлуатації.
Послідовні КП мають підвищену чутливість до перешкод і погіршують динаміку системи при зміні її параметрів.
Побудова бажаної зворотної логарифмічної частотної характеристики.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.