В основу побудови бажаних ЗЛЧХ систем, що стежать, повинні, бути покладені наступні основні показники якості: точність спостереження, швидкодія, запаси стійкості по фазі й амплітуді, фільтруючі властивості. Досягненню кожного з них відповідає реалізація визначених ділянок бажаної ЗЛЧХ.
Робоча
частота: 
Амплітуда
гармонійного сигналу:  град
град
Постійна складова швидкості зміни задаючого впливу:
![]()
![]()
Гармонійна
складова сумарної помилки: ![]() =0,05. Таке
припущення викликане тим, що передбачається, що гармонійна складова задаючого
впливу є безперервною функцією часу, що повільно змінюється, а, отже, час спостереження
значно перевищує час перехідного процесу, викликаного швидкістю зміни задаючого
впливу. Тому після перехідного процесу помилка системи буде визначатися
здебільшого гармонійною складовою помилки. Унаслідок цього її приймають рівній
половині сумарної помилки, залишаючи в запасі 50% помилки для обліку впливу
зовнішнього моменту, і швидкості зміни задаючого впливу.
=0,05. Таке
припущення викликане тим, що передбачається, що гармонійна складова задаючого
впливу є безперервною функцією часу, що повільно змінюється, а, отже, час спостереження
значно перевищує час перехідного процесу, викликаного швидкістю зміни задаючого
впливу. Тому після перехідного процесу помилка системи буде визначатися
здебільшого гармонійною складовою помилки. Унаслідок цього її приймають рівній
половині сумарної помилки, залишаючи в запасі 50% помилки для обліку впливу
зовнішнього моменту, і швидкості зміни задаючого впливу.
Ордината контрольної точки:
 Дб
Дб
Тип бажаної ЗЛАЧХ вибираємо в залежності від типу зворотного зв'язку: задано зворотний зв'язок по струму і швидкості, тому вибираємо другий тип бажаної ЗЛАЧХ.
Частота прив'язки:
Передатна характеристика бажаної ЗЛАЧХ третього типу:
Сопрягаючі частоти бажаної ЗЛАЧХ:
![]()
![]()
![]()
Побудова
логарифмічної частотної характеристики незмінної частини.
В
початковій стадії розрахунків приймаємо ![]() .
Незмінна частина має вигляд:
.
Незмінна частина має вигляд:

Знаходимо постійну часу двигуна:
Оскільки виконується
умова ![]() , то побудова здійснюється наступним чином:
ЗЛАЧХ проходить через початок координат, від 0 до
, то побудова здійснюється наступним чином:
ЗЛАЧХ проходить через початок координат, від 0 до ![]() має
перший нахил, від
має
перший нахил, від ![]() до
до ![]() –
третій, від
–
третій, від ![]() – четвертий.
– четвертий.
Знаходимо:
![]()
Синтез коригувальних пристроїв.
З метою забезпечення запропонованих показників якості керування в систему включаються додаткові пристрої, т.зв. коригувальні пристрої.
Застосування цих пристроїв спрямовано на введення в алгоритм керування похідних і інтегралів від помилки і від зовнішніх впливів. При цьому диференціювання й інтегрування може здійснитися або у всьому частотному діапазоні роботи системи, або на деякому його інтервалі. Послідовні коригувальні пристрої розміщають у ланцюзі основного впливу, а паралельні в ланцюгах зворотних зв'язків.
Синтез послідовного коригувального пристрою.
Визначаємо
отриманий коефіцієнт посилення розімкнутої системи як різницю між ординатою
ЗЛАЧХ незмінної частини і бажаної ЗЛАЧХ при частоті ![]() .
.
m =92 мм
звідси
 с-1
с-1
Визначаємо сумарну помилку:
![]()
де
 град. – швидкісна складова.
град. – швидкісна складова.
 град. – моментна складова.
град. – моментна складова.
![]() град.
град.
Як
бачимо, виконується умова ![]() .
.
Коефіцієнт
![]() неможливо реалізувати у електромеханічних
системах, тому необхідно ввести послідовний коригувальний пристрій. Його передатна
функція має вигляд:
неможливо реалізувати у електромеханічних
системах, тому необхідно ввести послідовний коригувальний пристрій. Його передатна
функція має вигляд:
Для
визначення параметрів коригувального пристрою знаходимо коефіцієнт підсилення ![]() , при якому забезпечується
, при якому забезпечується ![]() .
.
Визначаємо відношення отриманого коефіцієнта підсилення до необхідного:
 , приймаємо
, приймаємо ![]()
Знаходимо:
 с-1
с-1
Корегуємо
ЗЛАЧХ незмінної частини системи за допомогою послідовного коригувального
пристрою. Потім опускаємо отриману ЗЛАЧХ вниз до перетину її з бажаною ЗЛАЧХ
при частоті ![]() .
.
Знаходимо
частоту ![]() і відповідну постійну часу, при якій ці
ЗЛАЧХ перетинаються.
і відповідну постійну часу, при якій ці
ЗЛАЧХ перетинаються.
![]()
Розрахунок параметрів:
Нехай
![]()
![]()

|
|
|
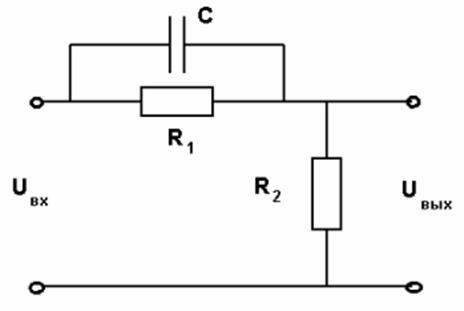
Рис.1 Принципова схема послідовного коригувального пристрою. |
Обираємо резистори ![]() С2-13-0,5-510 кОм,
С2-13-0,5-510 кОм, ![]() С2-13-0,5-27 кОм
С2-13-0,5-27 кОм
Синтез паралельного коригувального пристрою.
Згідно методу зворотних бажаних ЛАЧХ, ЗЛАЧХ розімкнутої скоректованої системи повинна співпадати з ЗБЛАЧХ, котра побудована с урахуванням заданих показників якості регулювання. При цьому і передатні функції скорегованої САУ та ЗБЛАЧХ повинні бути рівні:
Для обраного третього типу БЗЛАЧХ одержимо:
З огляду на ЗЗ по швидкості і струму:
Дорівнюємо ці рівняння:

Нехай  ,
,  тоді
одержимо
тоді
одержимо 
У такий спосіб паралельну корекцію проводимо за допомогою двох послідовно з'єднаних ланок:
|
|
|
Рис. 2. Принципова схема паралельного коригувального пристрою. |
Розрахунок параметрів:
Для
ланок приймаємо 
Нехай ![]() мкФ.
мкФ.
 Ом. Обираємо резистор
Ом. Обираємо резистор ![]() кОм
кОм
 Ом. Обираємо резистор
Ом. Обираємо резистор ![]() кОм
кОм
Перевірка стійкості внутрішнього контуру системи.
Стійкість внутрішнього контуру оцінюється тільки по запасах його стійкості по фазі при значенні частоти w = w3, тому що запас стійкості по амплітуді при w = w3 майже завжди забезпечується.
Для визначення запасу стійкості внутрішнього контуру варто знайти збільшення фази приw = w3 за формулою:

![]()
Параметр
b визначимо
по ЛАЧХ, як ординату точки перетину скоректованої ЗЛАЧХ із віссю ![]() :
:
Отримаємо:
з огляду на, що ![]() – функція періодична з періодом
– функція періодична з періодом ![]() :
:
![]()
Запас стійкості внутрішнього контуру по фазі.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.