Помимо рассмотренных видов нелинейности, может встретиться также какая-либо их комбинация. Кроме того, существуют динамические (частотно-зависимые) виды нелинейности. Проявлением такой нелинейности являются эффекты, связанные с существованием максимальной скорости нарастания напряжения; этот пример мы проиллюстрируем с помощью осциллограмм. Если максимальный ток, который может отдавать усилитель
(a) (b)
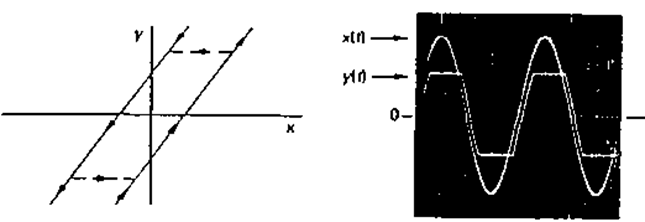
Рис. 2..33. (а) Гистерезис и (b) результирующий выходной сигнал y(t), являющийся откликом на синусоидальный сигнал
x (t) на входе.
(a) (b)
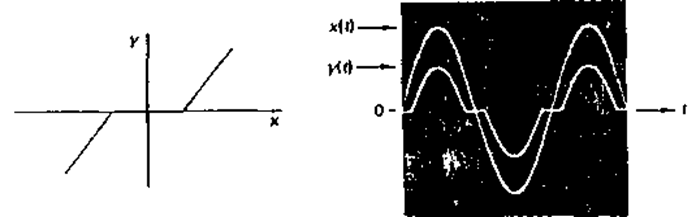
Рис. 2.34. (а) Мёртвая зона в передаточной характеристике системы. (b) Выходной отклик y(t) на синусоидальный входной сигнал x(t).
сигнала, подаваемого на отклоняющие пластины осциллографа, равен Imax, а емкость отклоняющих пластин равна С, то время нарастания или спада на осциллограмме не может быть меньше определенной минимальном величины. Это значение определяется максимальной скоростью
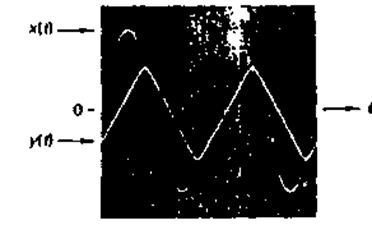
с которой может изменяться напряжение Vc между пластинами, которому пропорционально отклонение луча. Таким образом, скорость перемещения луча по экрану пропорциональна производной от Vc по времени. Как только частота пли амплитуда входного сигнала становятся настолько большими, что максимальное значение dVC/dt оказывается превышенным, изображение искажается и колебание приобретает треугольную форму, как показано на рис. 2.35.
|
|
Рис 2 35. Искажения вследствие существования максимальной скорости нарастания: х(t) - входной сигнал, y(t) - выходной сигнал.
Пределы измерения определяются интервалом (xmin, xmax), внутри которого с помощью данной системы можно измерить нужную величину с требуемой точностью. Динамический диапазон измерительной системы равен отношению xmax / xmin. Величина xmaxобычно определяется предельным значением допустимо!"! нелинейности, которая проявляется при больших входных сигналах. Величина xmin, как правило, определяется ошибками из-за смещения нуля п шумом, которым становится тем более значительным, чем меньше сигнал xmin — это наименьшее значение х, для которого может быть обеспечена заданная точность.
Возьмем, например, случай, когда надо с погрешностью ±3% измерить ток с помощью стрелочного прибора, собственная погрешность которого ±1% от всей шкалы. Динамический диапазон в этом случае равен лишь 3. Другой пример: с помощью измерительного усилителя нужно измерить напряжение с погрешностью 1%. Смещение пуля, отнесенное ко входу усилителя, меньше10 мкВ. Из-за нелинейности входное напряжение не должно превосходить 10 В, чтобы погрешность не превышала 1%. В этом примере динамический диапазон равен 10³.
Реакция измерительной системы на приложенное ко входу воздействие называется откликом системы. Отклик измерительной системы должен давать верное представление о воздействии; цель собственно измерения, очевидно, состоит не столько в том, чтобы определять характеристики самой измерительной системы! Когда, значения измеряемых физических величин меняются со временем (то есть в случае, когда измеряются динамические величины), важно точно знать, как измерительная система будет отслеживать эти изменения: поведение системы в динамике должно обеспечивать верное воспроизведение измеряемой величины.
Динамические свойства линейной измерительной системы Целиком определяются ее откликом на единичный скачок на входе (ее переходной характеристикой). Зная переходную характеристику можно найти время установления или время считывания измерительной системы. На рис.2.36 показаны сигнал x(t) на входе, имеющий вид скачка, и отклик y'(t) измерительной системы. Здесь отклик нормирован по отношению к чувствительности по постоянному току S(0), так что в пределе при t → ∞ значения входного и выходного сигналов совпадают. Время установления отсчитывается от момента, когда происходит скачок на входе, до такой точки на оси времени, вслед за которой выходной сигнал y'(t), попав в заданный интервал (у0 — Dуо, уо + Dy0) допустимых отклонений от конечного значения у0, остается в этом интервале. Отношение ± D у0 / у0 представляет собой относительную погрешность измерительной системы. Время установления служит мерой быстродействия измерительной системы.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.