y= 2а1х+2а3х3+2а5х5+…
Очевидно, что константа (или смещение) о0 и четные члены а2х2, а4х4, исчезают при использовании в балансной схеме двух преобразователей. Если нелинейность в функции f(x) не выражается никакими нечетными членами, то мы получим идеально линейную систему. В этом случае система относится к так называемой «разностной конфигурации». Однако обычно балансирование улучшает линейность системы всего лишь в ограниченном диапазоне значений входной величины х. Такая система называется «дифференциальной конфигурацией». Балансная схема не чувствительна к внешним возмущениям, так
как в ней, по существу, применяется параллельная компенсация (см. раздел 2.3.3.3). Схема невосприимчива к аддитивным помехам, если преобразователи Т и T’ одинаково чувствительны к этим помехам. Для того, чтобы она была невосприимчива также к мультипликативным помехам, коэффициенты чувствительности по отношению к помехам у преобразователей Т и Т’ должны быть одной величины, но противоположны по знаку. На рис. 3.1 (b) показан пример, в котором применена балансная схема преобразователя. Оба емкостных датчика перемещения, обозначенные С и С’, являются отдельными преобразователями. Входной величиной является смещение х, а выходной — напряжение V0. Пренебрегая краевыми эффектами на кромках пластин конденсатора, находим:
 и
и  .
.
Очевидно, что зависимость С = С(х) нелинейна Входная величина х входит в выражение для С с отрицательным знаком. Можно показать, что выходное напряжение V0 трансформаторного моста пропорционально разности емкостей конденсаторов С и С’:
![]()
Подстановка значений С и С’дает:
Использование в этом примере двух емкостных преобразователей смещения в балансной схеме, позволяет достичь идеальной линейности. Поэтому * мы можем записать:
V0 = xS
.
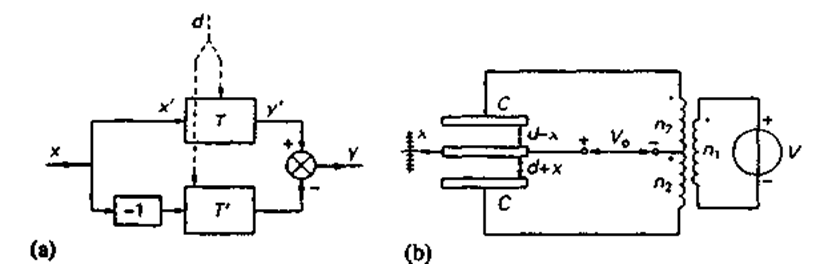
Рис. 3.1 (а) Балансная схема преобразователя, Т и Т' — два одинаковых преобразователя (b) Применение балансной схемы в емкостном датчике смещения.
Чувствительность S определяется как S = Vn2/n1d. Чувствительность моста определяется напряжением источника питания V.
Другой обычно используемой конфигурацией является схема с обратной связью, состоящая из двух преобразователей Т1 и Т2 (см. рис. 3.2). Назначением системы является преобразование входного сигнала х в электрический выходной сигнал у. Для этого можно воспользоваться единственным преобразователем Т1 Предположим, однако, что Tt не подходит для непосредственного использования из-за недопустимо большой нелинейности и слишком высокой чувствительности к помехам. Если у нас есть второй преобразователь, способный выполнять обратное преобразование (преобразовывать у в х), и это преобразование линейное и невосприимчиво к помехам, то, объединяя оба преобразователя Т1, и Т2 (с усилителем А для увеличения петлевого усиления) в схему с обратной связью, как показано на рис. 3.2(а), мы можем реализовать составной преобразователь для преобразования измеряемого сигнала х в сигнал у с такими же характеристиками, как у использованного обратного преобразователя (см. раздел 2.3.3.3). Необходимыми условиями достижения такого результата являются большой коэффициент петлевого усиления и квазистатический динамический режим элементов T1, T2 и А. Однако на практике динамическая характеристика, особенно у преобразователей Т1 и Т2 часто имеет более высокий порядок, поэтому ситуация оказывается не столь идеальной, как описано выше.
Рис. 3.2(b) иллюстрирует применение обратной связи в акселерометре. Входная величина, ускорение х, оказывает усилие на подвижную массу, соединенную со «звуковой катушкой» электродинамического выходного преобразователя. Ускорение приводит массу в движение. Это движение определяется датчиком смещения (здесь — разностный конденсатор). Выходной сигнал датчика смещения усиливается и подается в виде тока на катушку выходного преобразователя Т2, противодействуя изменению положения подвижной массы. Поэтому, если коэффициент усиления А велик, то масса будет едва смещаться. Таким образом, передаточная характеристика акселерометра определяется соотношением между током I, протекающим по звуковой катушке и тем усилием, которое катушка оказывает на подвижную
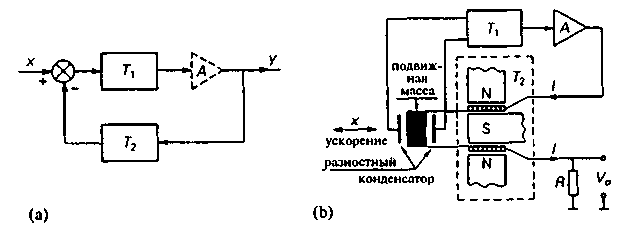
Рис. 3.2(а) Схема с отрицательной обратной связью T1 выполняет желаемое преобразование х в у, а Т2 осуществляет обратное преобразование. (b) Применение обратной связи в акселерометре.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.