3.1. Описание объекта моделирования
В данной лабораторной работе выполняется изучение совместной работы модели ПО алгоритма - TKB01704 (системы контроля защит и блокирвок АСУ ТП реакторного отделения ЭБ АЭС) и модели работы запорно-регулирующей арматуры R 209 (производство фирмы Belimo) совместно с работой привода (NR24-SR) со встроенной функцией ПИ-регулятора. Созданная замкнутая модель, используется для получения КП, являющихся составными частями плана (сценария) верификации ПО алгоритма - TKB01704.
3.2. Реализация модели в среде Simulink пакета инженерного проектирования MatLab
В пакете MatLab имеется специальная среда для исследования и моделирования систем контроля и управления – пакет Simulink. Создадим в данной среде совместную модель, описывающую работу алгоритма - TKB01704 и запорно-регулирующей арматуры R 209 совместно с приводом (NR24-SR) – ПИ-регулятором, при задании максимального времени работы модели - 150 с(внешний вид модели, приведен на рис. № 4.1).
В ходе моделирования рассматривается только процесс закрытия арматуры (TK21D02SAB1 и TK21D02SAB3) путем формирования задания для ПИ-регулятора – 90 градусов (настройки регулятора идентичны лабораторной работы № 3).
В дополнении к выполненному в лабораторных работах № 2 и № 3 добавлена подсистема Binarization, которая идентифицирует завершение процесса регулирования и переход арматуры (TK21D02SAB1 и TK21D02SAB3) в закрытое состояние.
Модели работы арматуры (TK21D02SAB1 и TK21D02SAB3) получают сигнал для старта процесса закрытия (Enable) в соответствии с появлением аварийного сигнала по превышению давления в герметичной оболочке ЭБ.
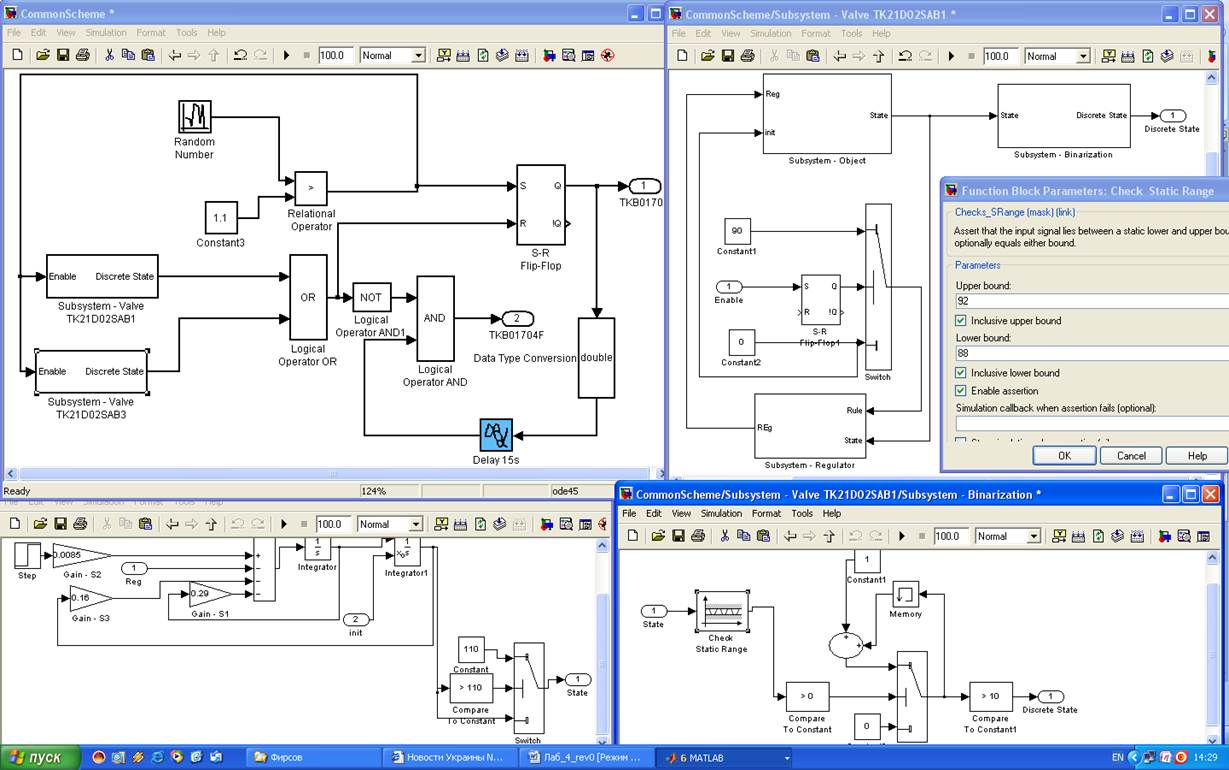
Рис. 4.1 Совместная модель, описывающую работу алгоритма - TKB01704 и запорно-регулирующей арматуры R 209 совместно с приводом (NR24-SR) – ПИ-регулятором
3.3. Выполнение самостоятельного построения модели, сценария верификации ПО и контрольных примеров
Выполнить построение модели, описывающей работу алгоритма - TKB01704 и запорно-регулирующей арматуры R 209 совместно с приводом (NR24-SR) – ПИ-регулятором, и сформировать сценарий и КП для верификации ПО в следующей последовательности:
1.Построить модель объекта (см. рис. 4.1) с учетом того, что для всех входных воздействий (TK21D02SAB1/ Состояние запорной арматуры SAB1 системы TK21 (дискретный выход Sybsystem – valve TK21D02SAB1), TK21D02SAB3/ Состояние запорной арматуры SAB3 системы TK21(дискретный выход Sybsystem – valve TK21D02SAB3), TK21P01602/ Давление внутри реакторной установки, атм (дискретный вход S триггер)) необходимо установить блок – To Workspace библиотеки Sinks для записи значений этих входов в рабочую область MatLab.
2. Запустить модель (т.к. для упрощения анализа будем рассматривать один сценарий, т.е. один запуск модели) и сформировать общий массив данных из значений входных переменных (см. предыдущий пункт) и выходных в привязке к времени работы модели. Значения выходных переменных хранятся в массиве (в привязке к тактам работы модели) - yout, значения времени (в привязке к тактам работы модели) – tout (данные массивы автоматически создаются при запуске моделирования в рабочей области MatLab). Объединить полученные массивы в один для которого будет следующий формат:
- первый столбец – время для каждого такта работы модели;
- второй, третий и четвертый столбец – значения переменных TK21D02SAB1, TK21D02SAB3, TK21P01602 в привязке к тактам работы модели;
- пятый и шестой столбец – значения переменных TKB01704, TKB01704F в привязке к тактам работы модели.
3. Сформировать последовательность событий (на основе общего массива данных), в которой каждое событие представляет связку изменения значений входных параметров и соответствующей реакции модели в виде изменения выходных значений. Данные события представляют собой контрольные примеры. Т.е. из общего массива данных выбрать только те строки, в которых значение любой переменной в столбцах № 2 - 6 изменилось относительно предыдущей строки (для этих контрольных примеров фиксируется время возникновения).
Оформить сценарий верификации, на основе полученных контрольных примеров, в следующем виде (последовательно для каждого КП):
- номер КП;
- значение временной задержки между текущим КП и предыдущим КП;
- значение входных параметров для данного КП;
- ожидаемое (полученное в ходе моделирования) значение выходных параметров для данного КП.
4.Сделать выводы о полноте перечня контрольных примеров для данного сценария.
Отчет по лабораторной работе должен содержать:
– цель и краткое теоретическое описание лабораторной работы;
– описание сценария проверки ПО ПТК, а именно,- входные и выходные значения для контрольных примеров, временные интервалы между КП;
– внешний вид полученной модели (с учетом всех подсистем) в среде Simulink;
– выводы о полноте перечня контрольных примеров для данного сценария.
Вопросы для самоконтроля:
1. Что такое планирование эксперимента?
2. Опишите понятие фактор и реакция?
3. Дайте определение стратегическому и тактическому планированию эксперимента?
4. Перечислите задачи стратегического планирования?
5. Что является задачей стратегического планирования?
6. Перечислите операции выполняемые в ходе проведения экперимента?
7. Дайте определение плана эксперимента (сценария)?
8. Что такое полно факторный эксперимент?
9. Приведите пример формирования сценария эксперимента?
1. Канер Сэм. Тестирование программного обеспечения: пер. с англ. / Сэм Канер, Джек Фолк, Енг Кек Нгуен. - К.:Диасофт, 2001. - 544 с.
2.Коллинз Г., Блей Дж. Структурные методы разработки систем: от стратегического планирования до тестирования. Пер. с англ. – М.: Финансы и статистика, 1986. – 264 с. 3. А.С. Кулик Основы моделирования систем: учеб. пособие / А.С. Кулик. -Х. Харьк. авиац. ин-т, 1998. -95с.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.