









повороту виконуючої осі (ВВ) об’єкта регулювання;
ВС і ВЕ – пара сельсинів;
UВ – фазочутливий випрямляч;
А – підсилювач;
UМ – тиристорний перетворювач;
М – двигун з незалежним збудженням;
LМ – обмотка збудження двигуна;
q – редуктор;
ОУ – об’єкт управління.
Вимірюючий прилад – Θвх- Θвих=δ; (1)
Фазочутливий підсилювач UВ – δ·кфп=Uфп; (2)
Підсилювач напруги А – Uфп·кп= Uп; (3)
Тиристорний перетворювач UМ – Uп·кмп= Ud, (4)
де кфп, кп, кмп – коефіцієнти передачі фазочутливого підсилювача, підсилювача напруги і тиристорного перетворювача;
Uфп, Uп, Ud – вихідні напруги фазочутливого підсилювача, підсилювача напруги і тиристорного перетворювача.
Можна записати наступну систему рівнянь, яка описує двигун постійного струму з незалежним збудженням:
Lя·diя/dt+rя·iя+c·ω= Ud; (5)
М-Мс=J·dω/dt; (6)
c·ω=Ed; (7)
c·iя =М,(8)
де Lя, rя – індуктивність і активний опір якірного кола, iя, Ed, ω – струм якоря, ЕРС і швидкість двигуна, c – коефіцієнт пропорційності між ЕРС і швидкістю, а також між моментом М і струмом якоря при незалежному потоку збудження, Мс – момент статичного навантаження, приведений до вала двигуна, J – сумарний момент інерції електропривода приведений до вала двигуна.
Рівняння передачі сигналу редуктором має наступний вигляд:
Θвих1=1/q ∫ω·dt (9)
де q – передаточне число понижуючого редуктора.
Проведемо аналіз нелінійних елементів (НЕ), які можливі в даній системі. Початковий сигнал редуктора буде відрізнятися від Cвых1 за рахунок нелінійності типу «люфт» в механіці цього виконуючого механізму. Тому реально на виході буде формуватися сигнал
Θвих= φ1(Θвих1) (10)
З іншого боку, коло «фазочутливий підсилювача - тиристорний перетворювач» (ФЧУ-ТП) (рівняння (2) -(4)) може виконувати функцію обмеження значення струму шляхом формування нелінійності з зоною насичення. Відповідно
Ud= φ2(δ) (11)
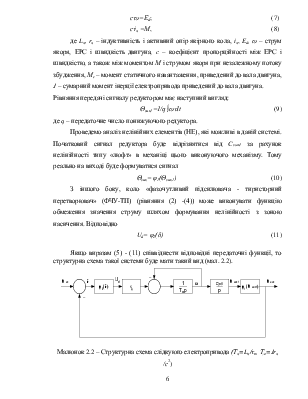
Якщо виразам (5) - (11) співвіднести відповідні передаточні функції, то структурна схема такої системи буде мати такий вид (мал. 2.2).
Малюнок 2.2 – Структурна схема слідкуюго електропривода (Тя=Lя /rя, Тм=Jrя /с2)
3. Складаня системи рівнянь в нормальній формі Коші
 При умові малого значення Тя, що в
більшості випадків відповідає реальній ситуації і відсутності зовнішнього
статичного навантаження на двигун, структурна схема слідкуючого електропривода
може бути зображена у вигляді схеми, показаної на мал. 3.1.
При умові малого значення Тя, що в
більшості випадків відповідає реальній ситуації і відсутності зовнішнього
статичного навантаження на двигун, структурна схема слідкуючого електропривода
може бути зображена у вигляді схеми, показаної на мал. 3.1.
Малюнок 3.1 – Спрощена структурна схема слідкуючого електропривода (КД=1/c - коефіцієнт передачі двигуна qоб=1/q).
Якщо урахувати, що досліджується вільний рух системи, тобто спостерігається незмінне значення вхідного зовнішнього впливу (Cвх=0), а в якості основної координати х прийняти значення кута повороту осі двигуна
х=Θвих1 (12),
то в якості другої фазової координати зручно прийняти значення швидкості двигуна ω
y= ω (13),
що обумовлено можливістю зв’язати їх між собою за допомогою простого виразу (9), тобто
x=qоб ∫y·dt (14)
або dx/dt=qоб·y (15)
Вибір приведених вище визначальних параметрів електропривода в якості фазових координат, при умові вільного руху системи, дозволяє замінити дві присутні в системі нелінійності однією результуючою
Ud= φ2(φ1(-x))= φ(-x) (16),
і дає можливість додатково зв’язати координати xі yтаким способом:
y= φ(-x)·кд /(Тмр+1) (17),
де р=d/dt - оператор диференціювання.
Вираз (17) дозволяє записати ще одне рівняння з системи рівнянь форми Коші для розрахунку фазових траєкторій в координатах параметрів стану
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.