

























2.Преобразователи и системы передачи измерительной информации
2.1. Общие сведения
Для контроля и управления технологическими процессами широко используются системы дистанционной передачи информации, которые предназначены для сбора информации с удаленных от наблюдателя объектов. С помощью этих систем измерительная информация может быть передана на расстояние до нескольких десятков километров.
По виду энергии носителя информации системы передачи информации подразделяют на электрические, пневматические и гидравлические. В ГСП приняты следующие системы передачи, в которых информация передается в виде унифицированных сигналов: пневматическая, электрическая токовая, электрическая частотная. Реже в практике измерений используются следующие системы передачи информации: реостатная, индуктивная, дифференциально - трансформаторная, ферродинамическая, сельсинная и другие.
Перечисленные системы передачи информации получают название в соответствии с типом преобразователя. Первичные измерительные преобразователи (ПИП) систем передачи информации ГСП обычно построены на блочно-модульном принципе, что позволяет большое число технологических параметров легко и с достаточной точностью преобразовать в усилие или линейное (угловое) перемещение. Преобразование усилия в унифицированный пневматический или электрический сигнал осуществляется, как правило, промежуточными преобразователями, работа которых основана на принципе компенсации сил. Широко распространены преобразователи типа “сила-давление” (пневмосиловые) и “сила-ток” (электросиловые), а также “перемещение-ток” (магнитомодуляционные с компенсацией магнитных потоков).
ПИП в ГСП конструктивно выполняются в виде блока, включающего чувствительный элемент, к которому непосредственно подводится измеряемый технологический параметр и один из вышеуказанных промежуточных преобразователей.
2.2. Пневматическая система передачи измерительной информации
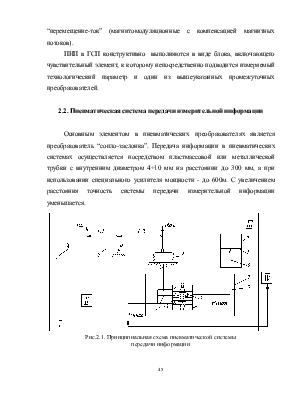
Основным элементом в пневматических преобразователях является преобразователь “сопло-заслонка”. Передача информации в пневматических системах осуществляется посредством пластмассовой или металлической трубки с внутренним диаметром 4÷10 мм на расстоянии до 300 мм, а при использовании специального усилителя мощности - до 600м. С увеличением расстояния точность системы передачи измерительной информации уменьшается.
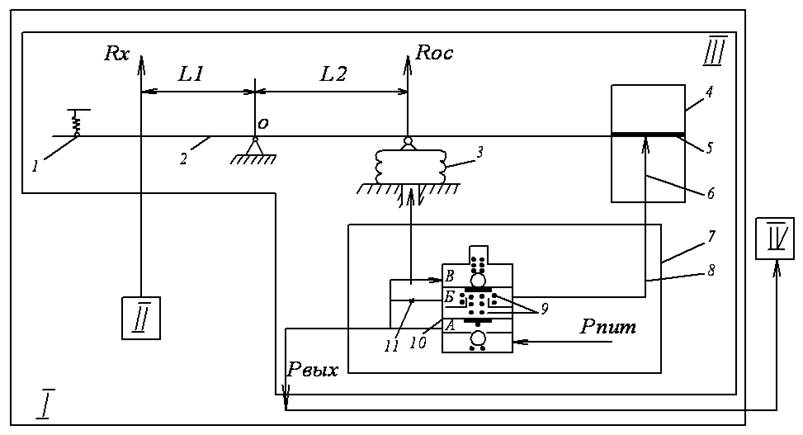
Рис.2.1. Принципиальная схема пневматической системы
передачи информации
На схеме (рис.2.1) ПИП I и приемник информации IV соединены между собой каналом связи. ПИП получает информацию от объекта и осуществляет преобразование измеряемого параметра в унифицированный сигнал (пневматический) Рвых. ПИП состоит из чувствительного элемента II и преобразователя “сила-давление III. Преобразователь III включает в себя корректор нуля - пружину 1; рычаг 2; сильфон обратной связи 3; пневмосопротивление - преобразователь “сопло-заслонка” 4; пневматический усилитель мощности 7. Преобразователь “сопло-заслонка” является индикатором перемещения рычага 2. Питание сопла осуществляется через усилитель 7 из линии выходного сигнала через постоянное пневмосопротивление 11. Потому давление в камере Б всегда меньше, чем в камерах А и В на одно и то же значение, которое определяется натяжением пружин 9.
При отклонении измеряемого параметра от заданного значения
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.