– среднеквадратичный критерий качества стремящейся к min
 (3.2)
(3.2)
– динамический критерий, степень колебательности
т.к. в системе присутствуют электрические звенья, то m = 0,75.
Производим расчет параметров настройки регулятора одноконтурной САР аналитическим методом
Передаточная функция объекта . (3.3)
. (3.3)
Получение расширенной АФХ объекта,
осуществляется заменой Р на (-![]() ) в формуле передаточной
функции объекта:
) в формуле передаточной
функции объекта:
 , (3.4)
, (3.4)
 . (3.5)
. (3.5)
 (3.6)
(3.6)
Получение расширенной АЧХ объекта
 (3.7)
(3.7)
Получение расширенной ФЧХ объекта
 (3.8)
(3.8)
Задаваясь любым значением частоты, находим Арасш и Fрасш объекта и строим вектор объекта в комплексной плоскости.
Из систем уравнения Найквиста – Михайлова определяются параметры регулятора.
Полученные характеристики регулятора откладываются в комплексной плоскости (ДП 05 ВАЭ 1. 01. 06). Из характеристик или вектора регулятора определяются параметрические функции Jи R.
J – мнимая параметрическая функция, представляет собой проекцию вектора регулятора на мнимую ось
R – реальная параметрическая функция, представляет собой проекцию вектора регулятора на реальную ось
По двум последним формулам (3.7) и (3.8) производим расчеты и сводим в таблицу 3.1.
Таблица 3.1 - Расширенных характеристик и вычисление мнимых и реальных параметров функции.
|
ω |
Арасш |
Fрасш |
Арег |
Fрег |
J |
R |
|
0,1 |
9,9 |
-75 |
0,1 |
75 |
0,09 |
0,02 |
|
0,32 |
6,2 |
-200 |
0,15 |
200 |
0,05 |
0,15 |
|
1 |
69 |
-429 |
0,01 |
429 |
0,01 |
0,005 |
Полученные числовые значения Jи Rв виде точки заносятся в плоскость параметрической функции (ДП 05 ВАЭ 1. 01. 06).
Задаваясь приращением частоты, строим плоскость параметрических функций до тех пор пока не будет найден max.
![]()
Jmax![]() = 0,05
= 0,05
Rmax![]() = 0,15
= 0,15
Составляем систему уравнений, которая отображает параметры только регулятора, для этого в передаточную функцию ПИД регулятора заносятся расширенное p.
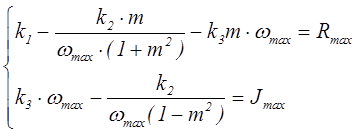 (3.9)
(3.9)
 (3.10)
(3.10)
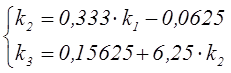
Для решения системы уравнения (3.10) задаемся любым численным значением коэффициента k1и решаем систему относительно k2и k3. Затем полученное значение подставляем в неравенство (3.11)
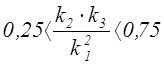 (3.11)
(3.11)
![]()
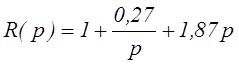
Неравенство выполнено при следующих коэффициентах:
k1 = 1
k2 = 0,27
k3 = 1,87
Литература
1. Автоматизация настройки систем управления / В.Я. Ротач, В.Ф. Кузищин, А.С. Клюев и др.; Под ред. В.Я. Ротача. – М.: Энергоатомиздат, 1984. – 391 с.
2. Клюев А.С., Лебедев А.Т., Новиков С.И. Наладка систем автоматического регулирования барабанных котлов. – М.: Энергоатомиздат, 1985. – с.
3. Наладка средств автоматизации и автоматических систем регулирования: Справочное пособие / А.С. Клюев, А.Т. Лебедев, С.А. Клюев и др.: по ред. А.С. Клюева. – М.: Энергоатомиздат, 1989. – 368 с.
4. Полоцкий Л.М., Лапшенков Г.И. Автоматизация химических производств. Теория, расчет и проектирование систем автоматизации. – М.: Химия, 1982. – 296 с.
5. Ротач В.Я. Расчет настройки промышленных систем регулирования. – М. – Л.: Госэнергоиздат, 1961. – 344 с.
6. Ротач В.Я. Расчет динамики промышленных автоматических систем регулирования. – М.: Энергия, 1973. – 440 с.
7. Ротач В.Я. Теория автоматического управления теплоэнергетическими процессами: Учебник для вузов. – М.: Энергоатомиздат, 1985. – 347 с.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.