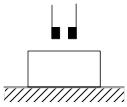
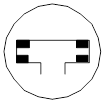
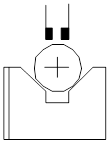
Пневматические приборы используются для контроля линейных размеров (рис.3.25,а), внутренних (рис.3.25,б) и наружных диаметров (рис.3.25,в), непрямолинейности оси отверстия (рис.3.25,г) и конусности (рис.3.25,д), а также отклонений от перпендикулярности (рис.3.25,е).
а) б) в)
г ) д) е)
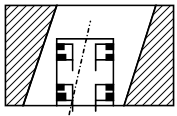
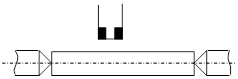
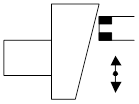
Рис. 3.25. Применение пневматических приборов для контроля:
а – высоты; б – диаметра отверстия; в – вала; г – прямолинейности оси отверстия торцу; д – конусности; е – перпендикулярности.
4. АВТОМАТИЧЕСКИЕ СРЕДСТВА КОНТРОЛЯ РАЗМЕРОВ
4.1. Классификация АСКР
По степени автоматизации процессов средства контроля подразделяют на следующие типы:
1. Приспособления, в которых операции загрузки и съема осуществляются вручную.
2. Полуавтоматические системы, в которых операция загрузки осуществляется вручную, а остальные операции – автоматически.
3. Автоматические системы, в которых весь цикл работы автоматизирован.
4. Самонастраивающиеся (адаптивные) автоматические системы, которые полностью автоматизированы и могут приспосабливаться к изменяющимся условиям среды.
По воздействию на технологический процесс автоматические средства контроля разделяются на:
1. Средства пассивного контроля (контрольные автоматы), которые проводят только рассортировку деталей на группы качества.
2. Средства активного контроля, в которых результаты контроля используются для непосредственного управления производственным процессом.
Основу автоматических средств контроля составляют различного рода измерительные преобразователи.
Измерительный преобразователь (ГОСТ 16263-70) – это средство измерения или контроля, предназначенное для выработки сигнала, соответствующего эксплутационной характеристике детали или изделия в форме, удобной для передачи, преобразования, обработки и хранения информации. Наибольшее распространение получили электроконтактные, пневмоэлектрические, индуктивные и фотоэлектрические преобразователи.
4.2. Электроконтактные преобразователи
В электроконтактных преобразователях изменение контролируемой величины приводит к размыканию или замыканию контактов, управляющих исполнительными элементами схемы. Контактов может быть один, два и реже несколько пар. Преобразователь 1 (рис.4.1) располагают на стойке 2 и под наконечник 3 подводят деталь 4, расположенную на подвижном (или неподвижном в зависимости от степени автоматизации) столе 5. Различают преобразователи предельные – для контроля предельных размеров деталей и амплитудные – для контроля амплитуды изменяющегося линейного параметра (отклонения формы, погрешности положения и т.д.).
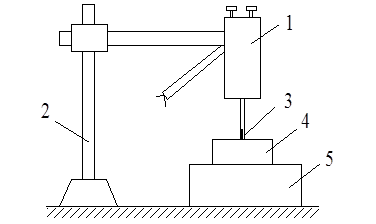
Рис. 4.1. Принципиальная схема установки преобразователя
Предельный электроконтактный преобразователь (рис.4.2) состоит из корпуса 1, измерительного стержня 2, регулируемых электрических контактов 3, подвижного центрального электрического контакта 4, гибкой пластины 5, на которой крепится подвижный контакт, пружины 6 и микрометрических винтов 7. Измерение контролируемой величины передается через стержень 2 к подвижному контакту 4. Преобразователь работает на замыкание и размыкание контактов 3-4, которые с помощью микрометрических винтов 7 настраиваются на предельные размеры измеряемой детали с помощью эталонов или концевых мер длины.
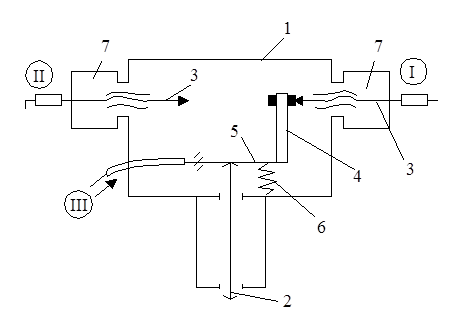
Рис. 4.2. Принципиальная схема предельного электроконтактного
преобразователя
Амплитудные электроконтактные преобразователи (рис.4.3) отличаются тем, что они настраиваются предварительно на величину колебания измеряемого параметра детали и характеризуются возможностью приспособляемости к конкретным условиям измерения. Они состоят из корпуса 1, измерительного стержня 2, пружины 3, фрикционной пластины 4, подвижного электрического контакта 5, неподвижного электрического контакта 6, подшипника качения 7 и регулируемого электрического контакта 8. При перемещении стержня 2 фрикционная пластина 4, поджимаемая усилием к подшипнику 7 поворачивает его и вместе с ним подвижный электрический контакт 5. При недопустимо большом ходе стержня вверх пластина 4 проскальзывает по отношению к подшипнику. Контакты при этом замыкаются. Большой ход стержня вниз позволяет установить адаптационно начало отчета от минимального размера измеряемой детали. Точность до 2 мкм.
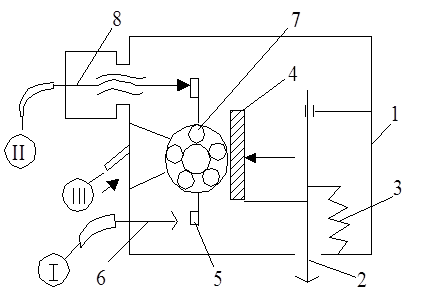
Рис. 4.3. Принципиальная схема амплитудного
электроконтактного преобразователя
Сигналы с преобразователей передаются на электронные реле, выпускаемые в виде отдельных блоков.
Недостатком электроконтактных преобразователей является невысокая чувствительность, малое число и пороговый характер команд, малые пределы измерения.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.