Пётр I, проявлявший большой интерес к токарному искусству, основал, отчасти для развлечения, отчасти для распространения технических навыков, дворцовую токарную мастерскую, где работали лучшие токари и конструкторы станков, русские и иностранцы[*]. Оборудование мастерской, состоявшее преимущественно из станков, изготовленных в ней самой, удовлетворяло наиболее высоким техническим требованиям своего времени.
Среди этого оборудования, сохранившегося в коллекциях Государственного Эрмитажа, привлекает внимание токарно-копировальный станок с надписью "St. Petersburg 1712".
Этот станок ("позитурная махина"), созданный в 1712 году Андреем Константиновичем Нартовым, личным токарем и механиком Петра I, имел механизированный (самоходный) суппорт - устройство для поддержания и перемещения резца. До этого в станках режущий инструмент удерживался и направлялся рукой мастера, а значит, и точность обработки зависела от его искусства. Приоритет создания суппорта на западе приписывался другим изобретателям, но они построили свои устройства много позже: англичанин Г. Модсли – в 1788, американцы Браун и Вилкинсон – в 1791 и 1798 гг., соответственно.
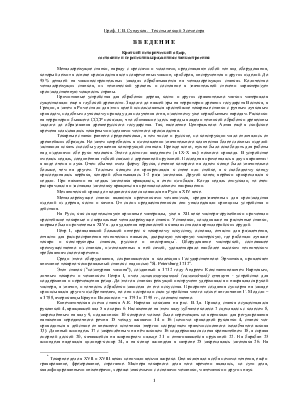
Кинематическая схема станка А.К. Нартова показана на рис. В.1,а. Привод станка осуществлялся рукояткой 4, вращавшей вал 5 в опорах 6. Насаженное на этом валу зубчатое колесо 7 сцеплялось с колесом 8, закреплённым на валу 9, подшипники 10 которого можно было перемещать по вертикали для регулирования натяжения передаточного ремня 15 между шкивами 14 и 16 (помимо приводной рукоятки 4, станок мог приводиться в действие от внешнего источника энергии посредством трансмиссионного желобчатого шкива 13). Длинный шпиндель 17 с закреплённым на нём шкивом 16 поддерживался слева кронштейном 18, а справа опорной доской 20, качавшейся на шарнирном пальце 21 и оттягивавшейся пружиной 22. На барабан 23 шпинделя надевался цилиндр-копир 24, а на конце шпинделя в патроне 25 закреплялась заготовка 26. На поверхности заготовки резцом 27, зажатым винтами в резцедержателе 28 суппорта 29, вырезалось копировавшееся изображение. Этот суппорт перемещался по направляющим 30 с помощью рейки 31. Такая же рейка сообщала движение копировальному суппорту 32, снабжённому держателем 33 для копирного пальца, "следившего" за рельефом рисунка на копире и прижимавшегося к нему пружиной. Рейки получали движение от вала 9 через верхнюю зубчатую пару 11 и 12, вертикальный вал 19, нижнюю червячную пару 34, 35 и систему зубчатых колес на горизонтальных промежуточных валах.
На рис. В.1,б отдельно изображена кинематическая схема механизма суппорта этого станка.
Суппорт приводился в действие от привода главного движения, т.е. от верхнего вала 2 и шкива 1, вращавшего шпиндель с копиром и заготовкой. За правым подшипником 3 на валу 2 было закреплено колесо 4 с торцевыми зубьями, сцеплявшимися с зубьями колеса 5, посаженного на вертикальном валу 6. Сверху последний имел опору – центр 7. Внизу на вертикальном валу 6 был закреплен червяк 8, сцеплявшийся с зубьями колеса 9, вращавшего поперечный горизонтальный вал 10, соединённый зубчатой передачей с валом 11. На концах этого вала закреплялись реечные шестерни 12, сцеплявшиеся с рейками 13. Рейки проходили через стойки 14 и скреплялись с ползунками копировального и резцового суппортов, двигавшимися по верхним и нижним направляющим брускам 15 и 16. Ползушка 17 скреплялась с резцедержателем болтом 18, а в верхней
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.