












Оглавление
Введение................................................................................................................... 2
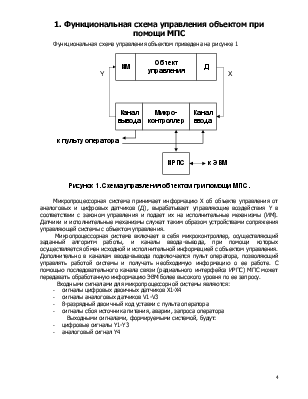
1. Функциональная схема управления объектом при помощи МПС......................................................................................................................................... 4
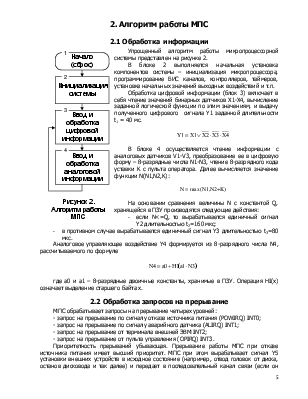
2. Алгоритм работы МПС................................................................................. 5
2.1 Обработка информации....................................................................................................... 5
2.2 Обработка запросов на прерывание.................................................................................... 5
3. Разработка микропроцессорной системы.................................. 7
3.1 Структурная схема МПС...................................................................................................... 7
3.2 Разработка системного модуля............................................................................................ 8
3.2 Разработка подсистемы памяти........................................................................................... 9
3.3 Разработка подсистемы ввода-вывода............................................................................... 11
3.4 Разработка подсистемы аналогового сопряжения........................................................... 13
3.5 Разработка схемы звуковой индикации пульта............................................................... 14
4. Оценки МПС....................................................................................................... 15
4.1 Оценка аппаратурных затрат............................................................................................. 15
4.2 Затраты времени программы.............................................................................................. 16
4.3 Затраты памяти.................................................................................................................... 16
Заключение.......................................................................................................... 17
Список литературы......................................................................................... 18
Приложения......................................................................................................... 19
При современном уровне развития технологий управление технологическими процессами становится все более сложной и ответственной задачей, подчас неподвластной человеку. Так, управление современным прокатным станом, ядерным реактором требует учета сотен и даже тысяч параметров и предполагает принятие единственного оптимального решения среди многих возможных. При этом анализ данных и принятие решения должны осуществляться в реальном масштабе времени, и всякая ошибка должна быть исключена, так как она может привести к непоправимым последствиям. Поэтому на смену человеку здесь приходит автоматика, которая работает гораздо быстрее человеческого разума, выполняя нехитрые рутинные действия, никогда не устает, не нервничает, не бывает невнимательной и никогда не ошибается. Область же деятельности человека вытесняется из механического нажатия кнопок и передвижения рукояток к разработке интеллектуальных автоматических систем управления и контроле над их работой.
Первоначально роль автоматических систем управления выполняли простейшие механические устройства с обратной связью (механические часы, распределитель пара в паровой машине, стабилизатор скорости вращения вала и т.п.). По мере усложнения управляемых процессов системы совершенствовались и усложнялись, однако уже скоро стало ясно, что механические, гидравлические, пневматические и подобные системы не смогут в полной мере удовлетворять растущим потребностям в качестве и скорости управления.
Качественно новое решение возникло с открытием электричества и разработкой электромеханических устройств (реле, электрических двигателей). Развитие электрических систем управления дало мощный толчок техническому прогрессу.
Тем не менее, и электромеханические системы быстро исчерпали свои резервы и морально устарели. Изобретение электронной лампы положило начало электронному принципу управления без всяких движущихся частей и открыло новую эру в развитии систем автоматического управления и регулирования.
Отказ от механических звеньев в системах привел к тому, что верхний предел скорости обработки информации системами резко подскочил. Стала возможной реализация систем управления такими процессами, где применение электромеханической автоматики было невозможным.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.