В блоке 2 выполняется начальная установка компонентов системы – инициализация микропроцессора, программирование БИС каналов, контроллеров, таймеров, установка начальных значений выходных воздействий и т.п.
Обработка цифровой информации (блок 3) включает в себя чтение значений бинарных датчиков X1-X4, вычисление заданной логической функции по этим значениям, и выдачу полученного цифрового сигнала Y1 заданной длительности t1 = 40 мс.
![]()
В блоке 4 осуществляется чтение информации с аналоговых датчиков V1-V3, преобразование ее в цифровую форму – 8-разрядные числа N1-N3, чтение 8-разрядного кода уставки K с пульта оператора. Далее вычисляется значение функции N(N1,N2,K):
N = max(N1,N2+K)
На основании сравнения величины N с константой Q, хранящейся в ПЗУ производятся следующие действия:
- если N<=Q, то вырабатывается единичный сигнал Y2 длительностью t2=160 мкс;
- в противном случае вырабатывается единичный сигнал Y3 длительностью t3=80 мкс.
Аналоговое управляющее воздействие Y4 формируется из 8-разрядного числа N4, рассчитываемого по формуле
![]()
![]()
где а0 и а1 – 8-разрядные двоичные константы, хранимые в ПЗУ. Операция HI(x) означает выделение старшего байта x.
МПС обрабатывает запросы на прерывание четырех уровней:
- запрос на прерывание по сигналу отказа источника питания (POWIRQ) INT0;
- запрос на прерывание по сигналу аварийного датчика (ALIRQ) INT1;
- запрос на прерывание от терминала внешней ЭВМ INT2;
- запрос на прерывание от пульта управления (OPIRQ) INT3.
Приоритетность прерываний убывающая. Прерывание работы МПС при отказе источника питания имеет высший приоритет. МПС при этом вырабатывает сигнал Y5 установки внешних устройств в исходное состояние (например, отвод головок от диска, останов дисковода и так далее) и передает в последовательный канал связи (если он был активен) код символа «!». Сигнал Y5 представляет собой два прямоугольных импульса длительностью 30 мкс, следующие с интервалом в 30 мкс. После выполнения указанных действий МП останавливается.
Прерывание от сигнала аварийного датчика включает на пульте управления аварийную звуковую сигнализацию с частотой 500 Гц.
Прерывания от терминала внешней ЭВМ осуществляются при приеме последовательным каналом связи какого-нибудь символа. Приемник БИС последовательного адаптера выставляет при этом запрос на прерывание работы основной программы МПС с целью передачи в последовательный канал связи запрашиваемой информации. Запрашиваемая информация формируется в зависимости от принятого из канала символа. При приеме символа «D» в канал передается значение Y1, при приеме символа «А» - значение Y4. После загрузки в буфер передатчика БИС последовательного адаптера запрашиваемой информации управление передается в прерванную программу.
Прерывание оператора влечет за собой выдачу на регистр индикации следующих значений:
- последнее значение Y1
- результат сравнения N>Q
- значение выражения X1*X2*X3*X4
- значение выражения X1+X2+X3+X4
Далее необходимо продолжить выполнение прерванной программы.
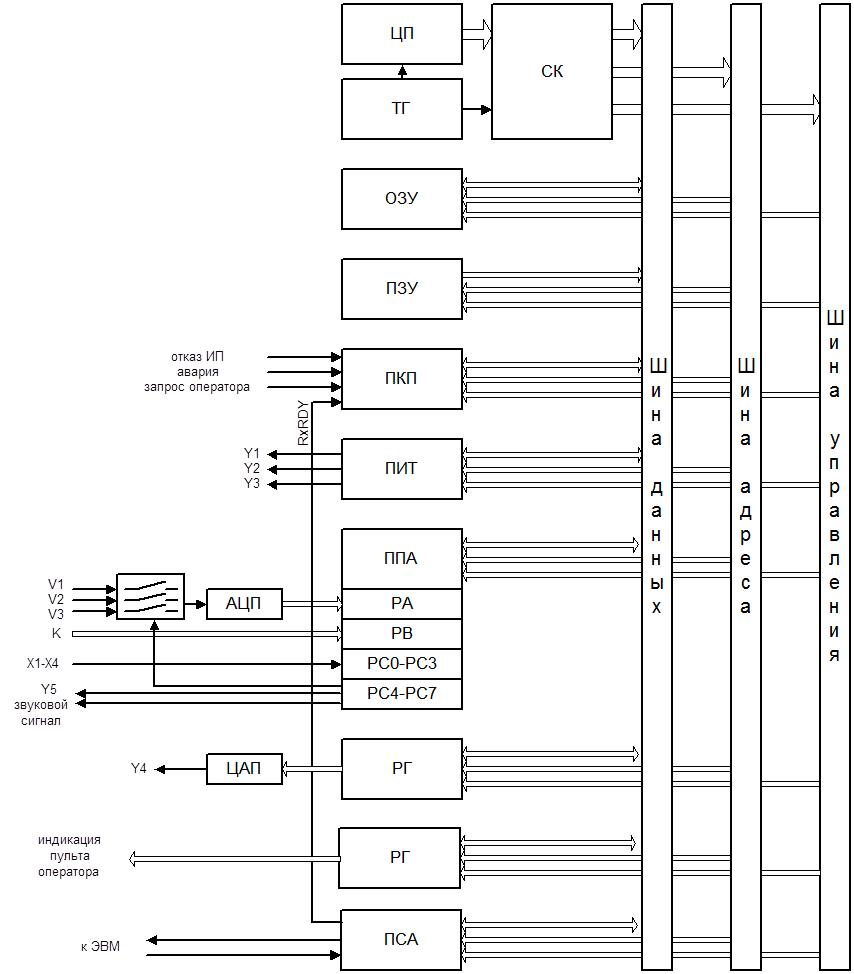 |
Рисунок 3. Структурная схема микропроцессорной системы.
На рисунке обозначены следующие блоки:
- ТГ – тактовый генератор
- ЦП – центральный процессор
- СК – системный контроллер
- ОЗУ, ПЗУ – оперативная и постоянная память
- ПКП – контроллер прерываний
- ПИТ –таймер
- ППА – параллельный порт
- РГ – регистр-защелка (параллельный порт вывода)
- ПСА – последовательный порт
- АЦП, ЦАП – преобразователи
Входные сигналы:
- X1-X4 – сигналы с двоичных датчиков
- V1-V3 – сигналы с аналоговых датчиков
- «отказ ИП», «авария», «запрос оператора» - запросы на прерывание
- K – 8-разрядный код уставки с пульта оператора
Выходные сигналы:
- Y1-Y3 – двоичные сигналы управления объектом
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.