
























по дисциплине
²Микропроцессорные средства управляющих систем²
Выполнил: Проверила:
студент группы ЭС-41 доцент
Зайцев А.А. Рязанцева Н.В.
1999 г.
Введение |
2 |
|||
|
1. Техническое задание на проектирование |
3 |
|||
|
1.1. |
Структура МПС |
4 |
||
|
1.2. |
Алгоритм работы МПС |
6 |
||
|
1.3. |
Обработка цифровой информации |
8 |
||
|
1.4. |
Обработка аналоговой информации |
9 |
||
|
1.5. |
Обработка запросов на прерывание |
10 |
||
|
1.6. |
Пульт управления |
12 |
||
|
2. Разработка МПС |
||||
|
2.1. |
Разработка схемы центрального процессора |
13 |
||
|
2.2. |
Разработка подсистемы памяти |
14 |
||
|
2.3. |
Разработка подсистемы ввода –вывода |
16 |
||
|
2.4. |
Разработка последовательного канала связи |
18 |
||
|
2.5. |
Обслуживание запросов на прерывание |
19 |
||
|
3. Оценка микропроцессорной системы |
20 |
|||
|
Приложение 1 |
22 |
|||
|
Приложение 2 |
24 |
|||
Приложение 3 |
30 |
|||
Заключение |
31 |
|||
Литература |
32 |
|||
Одно из главных направлений работы по ускорению научно-технического прогресса – широкая автоматизация технологических процессов на основе автоматизированных станков, машин и механизмов, унифицированных модулей оборудования, робототехнических комплексов и вычислительной техники. В этих целях ускоряется создание гибких автоматизированных производств, систем автоматизированного проектирования, обеспечивающих существенный рост производительности труда и резкое снижение доли ручного труда, повышение технического уровня выпускаемой продукции, сокращение сроков и улучшениу качества проектных и конструкторских работ.
Для решения этих и ряда других проблем, принципиально важным и необходимым является широкое применение микропроцессорных вычислительных средств, поскольку именно микропоцессорная техника играет активную роль на современном этапе научно-технического прогресса.
Применение цифровых элементов позволяет внедрять очень гибкие решения, значительно упростить конструирование и настройку систем управления.
1. Техническое задание на проектирование
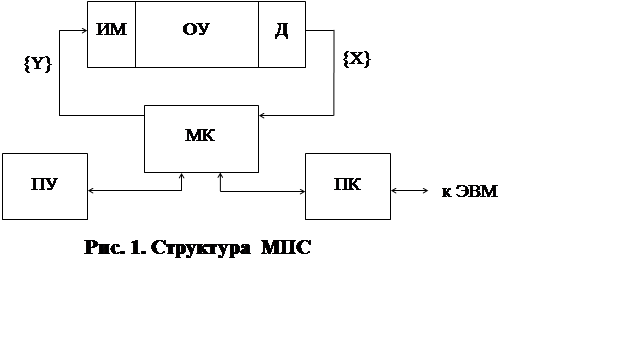 |
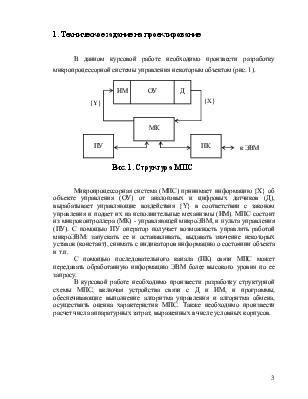
Микропроцессорная система (МПС) принимает информацию {X} об объекте управления (ОУ) от аналоговых и цифровых датчиков (Д), вырабатывает управляющие воздействия {Y} в соответствии с законом управления и подает их на исполнительные механизмы (ИМ). МПС состоит из микроконтроллера (МК) - управляющей микроЭВМ, и пульта управления (ПУ). С помощью ПУ оператор получает возможность управлять работой микроЭВМ: запускать ее и останавливать, выдавать значение некоторых уставок (констант), снимать с индикаторов информацию о состоянии объекта и т.п.
С помощью последовательного канала (ПК) связи МПС может передавать обработанную информацию ЭВМ более высокого уровня по ее запросу.
В курсовой работе необходимо произвести разработку структурной схемы МПС, включая устройства связи с Д и ИМ, и программы, обеспечивающие выполнение алгоритма управления и алгоритма обмена, осуществить оценка характеристик МПС. Также необходимо произвести расчет числа аппаратурных затрат, выраженных в числе условных корпусов.
1.1
Структура МПС
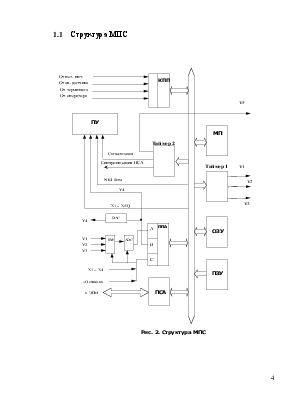
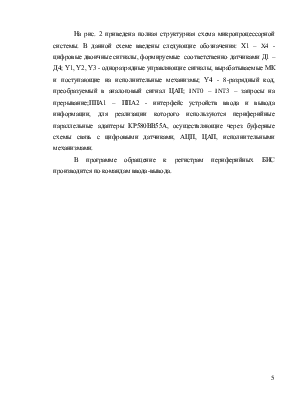
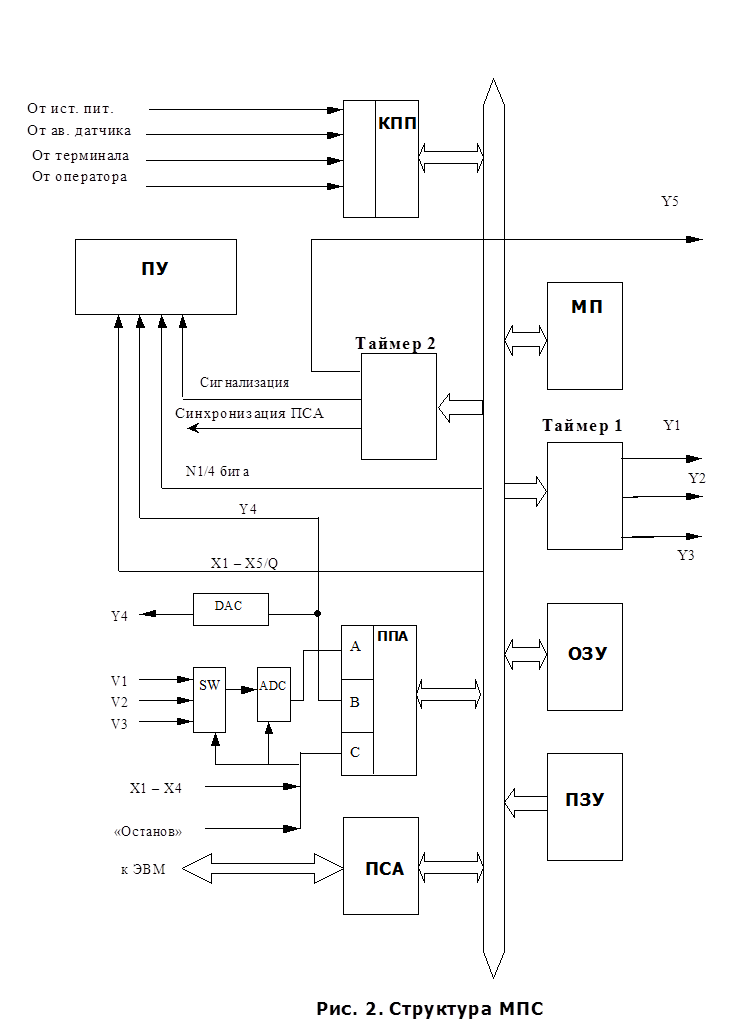
На рис. 2 приведена полная структурная схема микропроцессорной системы. В данной схеме введены следующие обозначения: X1 – X4 - цифровые двоичные сигналы, формируемые соответственно датчиками Д1 – Д4; Y1, Y2, Y3 - одноразрядные управляющие сигналы, вырабатываемые МК и поступающие на исполнительные механизмы; Y4 - 8-разрядный код, преобразуемый в аналоговый сигнал ЦАП; INT0 – INT3 – запросы на прерывание;ППА1 – ППА2 - интерфейс устройств ввода и вывода информации, для реализации которого используются периферийные параллельные адаптеры КР580ВВ55А, осуществляющие через буферные схемы связь с цифровыми датчиками, АЦП, ЦАП, исполнительными механизмами.
В программе обращение к регистрам периферийных БИС производится по командам ввода-вывода.
1.2 Алгоритм работы МПС
Алгоритм работы МПС представлен на рис. 3.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.