При сравнении стратегий случайного доступа и управляемого доступа получены следующие результаты: при малой нагрузке (небольшом числе станций) схемы случайного доступа превосходят схемы управляемого доступа. Это происходит потому, что задержка случайного доступа в случае сравнительно небольшого числа столкновений приближается к минимально возможному времени передачи сообщения.
Однако способ случайного доступа требует значительного усложнения программного обеспечения, которое должно адекватно реагировать на столкновения информации в сети, обрабатывать такие ситуации путём повторной передачи кадра. Поэтому в проекте принято решение использовать систему с «виртуальным кольцом» (маркерная шина).
Приведённый алгоритм соответствует стандарту IEEE 802.4, определяющему логическое кольцо физической шины при помощи численных значений адресов с тем только отличием, что маркер передаётся от станции к станции не в убывающем порядке численных адресов станций [3] (стр.176), а наоборот.
Микроконтроллер МК51 предназначен для принятия, обработки сигналов, поступающих с объекта управления; выдачи воздействий на объект управления и обеспечения работы контроллера в сети. Схема включения микроконтроллера и подключаемых к нему устройств приведена на рис.2.
Сброс МК осуществляется путём подачи на вход RST сигнала 1. Для уверенного сброса МК51 этот сигнал должен быть удержан на входе RST хотя бы в течение двух машинных циклов (24 периода резонатора). Для автоматической подачи сигнала сброса на вход RST микроконтроллера используется RC-цепочка R4-C3. Время, необходимое для полного заряда конденсатора C3, обеспечивает уверенный запуск резонатора и его работу в течение более чем двух машинных циклов. Номинал R4 8,2кОм, C3 – 10 мкФ [7].
Корпус МК51 имеет два вывода для подключения кварцевого резонатора. На рис.2. показано подключение кварцевого резонатора к выводам XTAL1 и XTAL2. В работе используется кварц с частотой 12 МГц. Номиналы конденсаторов С1 и С2 – 30 мкФ. Так как при работе не используется внешняя память программ, то на вывод EA необходимо подать неактивный сигнал, что осуществляется путём подачи на EA +5В через резистор R3 1кОм [8].
МК51 имеет четыре программируемых порта ввода/вывода для взаимодействия со средой в стандарте ТТЛ. Все четыре порта предназначены для ввода или вывода информации побайтно.
Выходные линии портов 1, 2 и 3 могут работать на одну ТТЛ схему. Линии порта 0 могут быть нагружены на два входа ТТЛ схем каждая.
К линиям порта 0 подключается АЦП для использования в процессе работы двоичного эквивалента аналогового сигнала, поступающего на вход системы. В системе используется только 7 старших разрядов выходных сигналов АЦП. При этом число различимых уровней входного аналогового сигнала составит 27. Отсюда абсолютная погрешность, определяемая весом младшего используемого разряда e=10/27=0.078 В, что удовлетворяет условиям задания, так как диапазон изменения аналогового сигнала от 0,1>>0,078 до 10В.
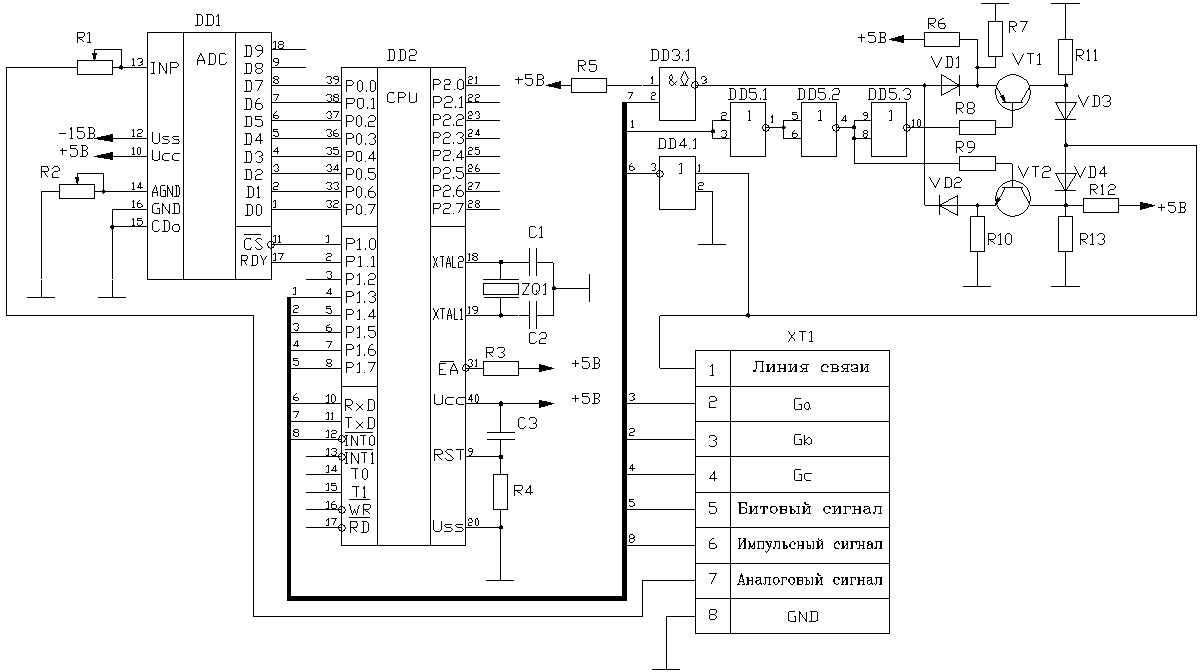
Рисунок 2. Схема включения микроконтроллера, АЦП, передатчика и приёмника
Линии порта 1 используются для выдачи управляющих воздействий на объект управления (линии P1.4, P1.5, P1.6), считывания значения битового входного воздействия (линия P1.7), а также для управления внешними устройствами, такими как АЦП DD1 (линии P1.0 и P1.1), устройство коммутации передатчика с линией связи (линия P1.3).
Порт 2 не используется.
Линии порта 3 запрограммированы на выполнение специализированных функций обмена информацией со средой. При этом импульсные входные воздействия подаются на вход INT0 для подсчёта количества импульсов.
АЦП 1113ПВ1 - функционально законченный совместимый с микропроцессорами, работающий с ТТЛ уровнями АЦП последовательного приближения. Имеет внутренний источник опорного напряжения, генератор тактовых импульсов и компаратор напряжения. Для включения АЦП необходимы только источник питания и формирователь преобразования.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.