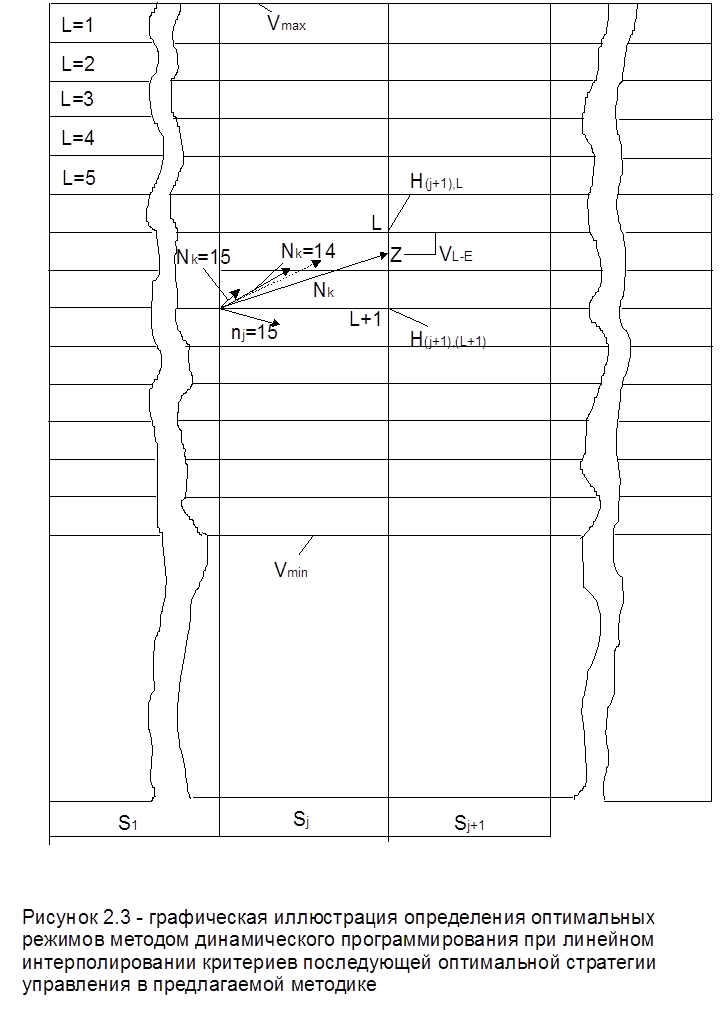
При определении критерия H0j+1.z используется линейное и нелинейное (по n = 3 … 5 плавающим узловым точкам) интерполирование так, чтобы точка Z находилась в середине n узловых точек, критерии оптимальности которых известны при выполнении расчетов на предыдущем шаге варьирования.
При линейном интерполировании критериев H0j+1.L, H0j+1.L+1 для нахождения критерия H0j+1.z в точке Z (рисунок 2.3), условие оптимальности выглядит следующим образом:
 (2.11)
(2.11)
nk,jT
где Hj – критерий, оценивающий траекторию движения поезда для одного из режимов ведения nk на шаге DSj от начальной точки L узла координатной сетки до конечного состояния объекта управления на заданном участке;
hj – критерий, оценивающий траекторию движения поезда только на шаге DSj;
 (2.12)
(2.12)
DGj, Dtj – расход топлива и время движения поезда на j – м шаге варьирования;
l – множитель Лангранжа, задающий время хода по участку, в рамках которого определяются оптимальные режимы ведения n0kj;
H0(j+1).L – критерий, оценивающий оптимальный процесс движения поезда от узловой точки L(j+1)-й вертикали до конечного состояния объекта управления;
H0(j+1).(L+1) – критерий, оценивающий оптимальный процесс движения поезда от узловой точки L(j+1) (j+1)-й вертикали до конечного состояния объекта управления;
DVc – размер интервальной сетки;
DVL+z – длина отрезка между точками L и Z внутри интервала L-(L+1).
Рассмотрим принцип максимума Понтрягина. Условие оптимальности процесса движения поезда оценивается критерием [].
 (2.13)
(2.13)
где Gч – удельный (часовой) расход топлива;
F – равнодействующая сил приложенных к поезду:
 (2.14)
(2.14)
g – ускорение свободного падения;
Q, P – соответственно масса состава и локомотива;
V – скорость движения поезда;
y1, y2 – вспомогательные переменные, причем:
![]()
 (2.15)
(2.15)
yТ – параметр, определяющий интенсивность торможения.
Символ «0» в обозначениях (H0, n0k, … ) говорит о принадлежности к оптимальной траектории. Процедура расчета подобна стрельбе по цели. Специальным «прицелом» подбираются такие начальные значения y1н, y2н, которые, изменяясь по дифференциальным уравнениям (2.15), обеспечивают попадание в «мишень» (т.е. достижения конечного состояния объекта управления по такой траектории, в каждой точке которой после перебора всех возможных режимов nk, обеспечивается выполнение режимов оптимальности (2.13)).
При определении допущениях и упрощениях критерием и условием оптимальности движения поезда по участку является [7,16,17,27]:
![]() (2.16)
(2.16)
т.е. в каждый момент времени необходимо брать такое управление nk, которое обеспечивало бы выполнение условия (2.16). варьируя значением переменной y, можно найти такую оптимальную траекторию вместе с режимами n0k, при которой расчетное время хода ТР будет равно заданному Тз по графику движения.
Наиболее рационально использовать метод динамического программирования в сочетании с принципом максимума Понтрягина, или так называемый метод «блуждающей трубки». Принцип максимума используется с упрощённым критерием оптимальности.
 |
2. 5 МОДЕЛЬ СИСТЕМЫ АНАЛИЗА И УПРАВЛЕНИЯ ПРОЦЕССОМ ДВИЖЕНИЯ ПОЕЗДА
На основании теоретических выкладок можно создать компьютерную модель движения поезда позволяющую провести анализ процессов движения.
Структурно, комплекс будет выглядеть так:
· Центральный модуль управления (головная программа), он реализует связь между :
а) регулятором скорости;
б) управляющими и известительными меню на маниторе компьютера(используется при диалоговом моделировании);
в) тяговым приводом и тормозами;
г) блоком статистики
· Регулятор скорости. Его основное назначение в управлении приводом и автотормозами при анализе поездных ситуаций, он должен обеспечивать поддержание заданной скорости на элементах профиля, рекомендовать повышение скорости только в тот момент, когда поезд покинул место ограничения, дать рекомендацию о остановке или команде «выбег».
· Регулятор прицельного торможения, он будет
использоваться для анализа местонахождения состава и рекомендаций о подводе
состава к местам требующим постоянного или временного снижения скорости (с
точностью ![]() км/ч и
км/ч и ![]() м.),
выдача данных обеспечивающих поддержание скорости не выше значений, допустимых
для данного поезда на конкретном участке пути.
м.),
выдача данных обеспечивающих поддержание скорости не выше значений, допустимых
для данного поезда на конкретном участке пути.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.