Контроль сложных изделий - трудоемкий и длительный процесс, требующий усилий большого числа лиц для получения достоверной информации. Системы контроля на базе микропроцессоров и микроЭВМ обладают большими преимуществами в отношении стоимости контроля, уменьшения времени его проведения и обработки результатов, надежности, обеспечивают значительную гибкость и модульную простоту. В основу решения задачи автоматизированного контроля технического состояния объектов положены следующие принципы: максимальная степень автоматизации процесса контроля, повышение достоверности результатов, автоматическая выдача протокола результатов испытаний, максимальная простота и доступность программного обеспечения.
1 Техническое задание на проектирование системы
В момент запуска системы она находится в режиме ожидания, т.е. питание на камере отсутствует. В начальный момент система запоминает текущие значения всех параметров, которые связаны с необходимостью вести видеонаблюдение. Другими словами происходит считывание текущего значения давления в комнате и “относительные координаты” самого интенсивного инфракрасного излучения (выбор объекта сканирования производит датчик положения инфракрасного излучения). Далее система работает в цикле опроса датчиков. В случае если произойдет изменение какого-либо параметра, то система подаст питание на камеру и будет следить за объектом наблюдения.
В случае возникновения прерывания от блока питания система перейдет в ждущий режим, отключится питание камеры и двигателей, управляющих положением камеры.
При возникновении прерывания от USART система передаст в интерфейс RS-485 лог своей работы.
В логе работы сохраняются: относительное время запуска системы видеонаблюдения и номер датчика, приведшего к запуску системы.
2 Обоснование выбора элементной базы
Данная система будет построена на основе микроконтроллера PIC16F877A.
Данный выбор обоснован тем, что этот микроконтроллер обладает всеми необходимыми для функционирования системы устройствами (аналогово-цифровой преобразователь, USART, 5 портов ввода/вывода) у себя в кристалле. Что несомненно увеличивает надежность всей системы, поскольку нет необходимости в нескольких кристаллах.
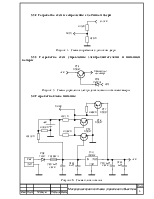
В силовой части преобразователей и схем управления будут применены полупроводниковые транзисторы малой мощности. Необходимость в более мощных транзисторах отсутствует, поскольку как сама камера, так и двигатели управления положением камеры потребляют очень малые токи.
3 Проектирование аппаратной части
3.1 Функциональная схема системы управления

3.2 Разработка подсистемы ввода-вывода
Подсистема ввода-вывода будет реализована по стандарту RS-485. В роли ресивера-трансмиттера в микроконтроллере будет выступать USART
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.