> with (plots):
Warning, the name changecoords has been redefined
> DU1:=diff (i(t) , t ) = (E(t) - i(t)*R - U(t) ) / L , diff ( U(t) , t ) = ( i(t) - Idt (t) )/C ;
![]()
> Idt := (t) -> .260832323382505338*U(t)*exp(-12.5674705762305906*U(t))-.273302536160403842e-2*exp(-100001.490076061804*U(t))+.27330253616040e-2 ;

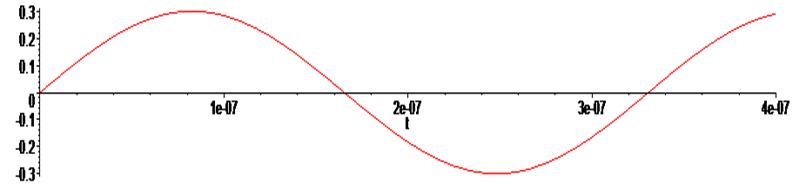
> E:=(t) -> 0.3*sin(19000000*t);
![]()
> plot(E(t), t=0 .. .4e-6);

> Nu := i(0) = 0 , U(0) = 0 :
> S := i(t) , U(t) :
> R := 10: C := 1E-11: L := 1E-7:
> Rs1 := dsolve ( { DU1 , Nu } , {S} , type = numeric , maxfun = 10000000 ) ;
![]()
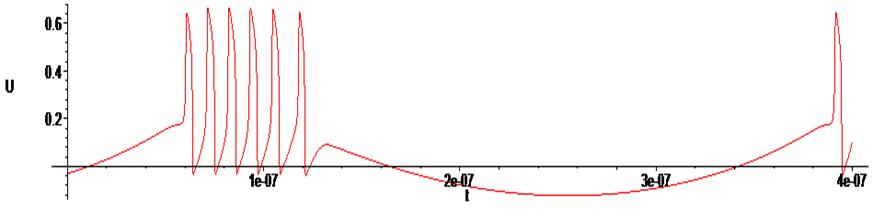
> odeplot(Rs1,[t,U(t)],0.. .4e-6, numpoints = 50000);
Warning, cannot evaluate the solution further right of .21418028e-6, maxfun limit exceeded (see ?dsolve,maxfun for details)
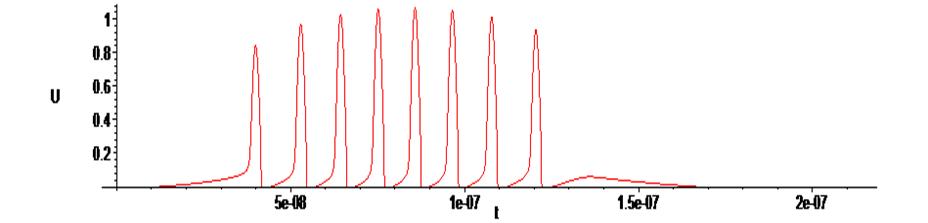
Как видим, СКМ Maple предупреждает, что решение получено только до точки t = .21418028e-6 . Чтобы получить решение на всём интересующем нас интервале необходимо далее увеличивать число точек интегрирования либо снижать точность вычислений, воспользовавшись предназначенными для этого опциями функции dsolve. В ряде случаев к требуемому результату может привести замена метода решения.
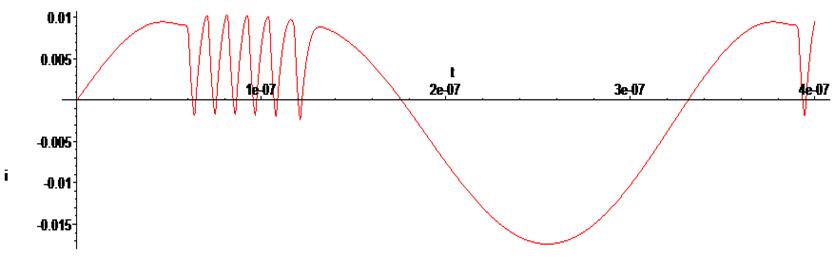
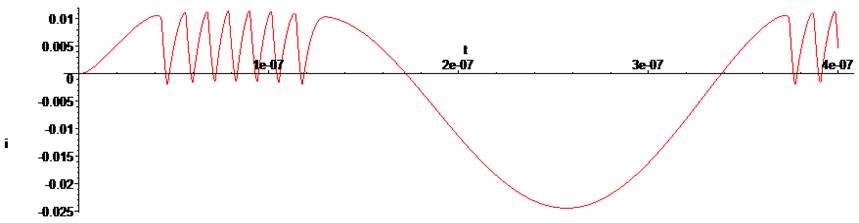
> odeplot(Rs1,[t,i(t)],0.. .4e-6, numpoints = 50000);
Warning, cannot evaluate the solution further right of .21418028e-6, maxfun limit exceeded (see ?dsolve,maxfun for details)
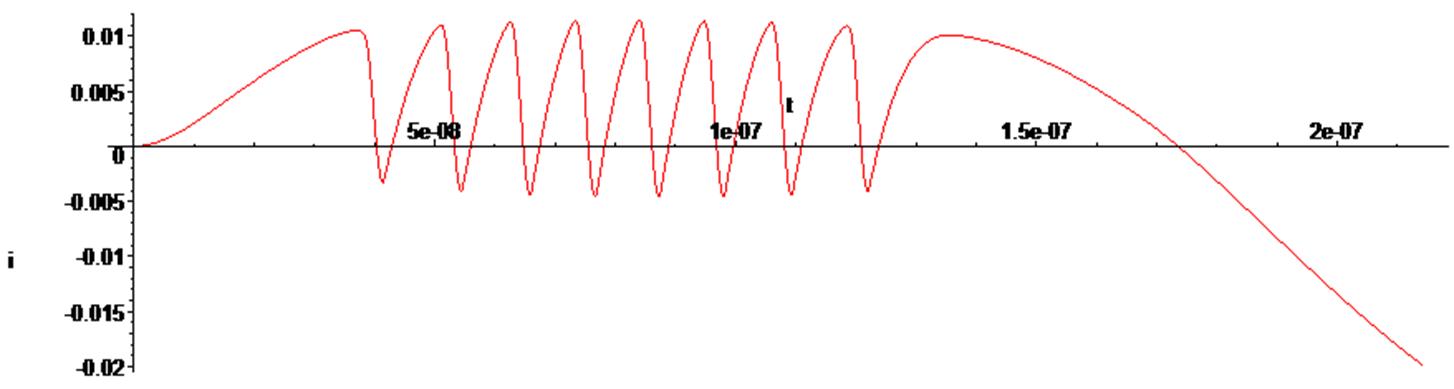
Таким образом, на положительной полуволне входного сигнала наблюдаются периодические колебания токов и потенциалов в схеме.
Далее выполним этот же вычислительный эксперимент c полиномиальной аппроксимирующей кривой.
> restart: with (plots):
Warning, the name changecoords has been redefined
> DUS:=diff (i(t) , t ) = (E(t) - i(t)*R - U(t) ) / L , diff ( U(t) , t ) = ( i(t) - Idt (t) )/C ;
![]()
> Idt := (t) -> -.173436968680306253*U(t)^4+.633171796172742107*U(t)^3-.482681600586971571*U(t)^2+.986182570285672744e-1*U(t)+.338585492808390292e-2 ;

> Nu := i(0) = 0 , U(0) = 0 :
> S := i(t) , U(t) :
> R := 10: C := 1E-11: L := 1E-7:
> E:=(t) -> 0.3: # Входной сигнал - постоянное напряжение 0.3В
> RsS := dsolve ( { DUS , Nu } , {S} , type = numeric , maxfun = 1000000 ) ;
![]()
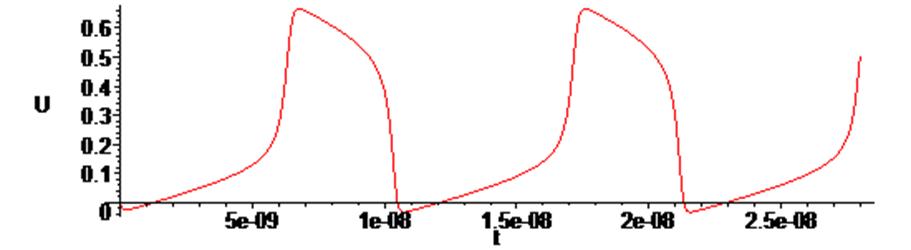
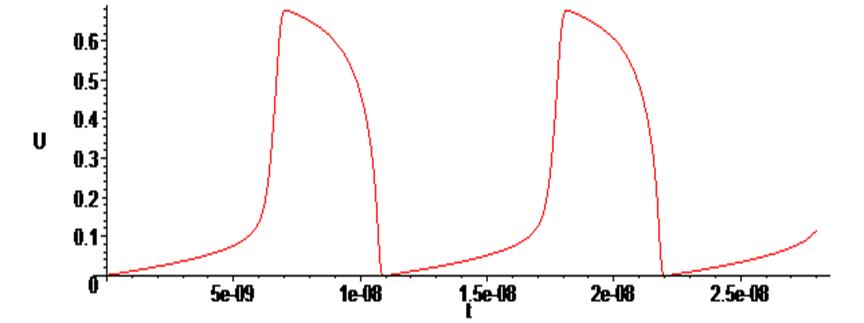
> odeplot(RsS,[t,U(t)],0.. 2.8*10^(-8), numpoints = 500);
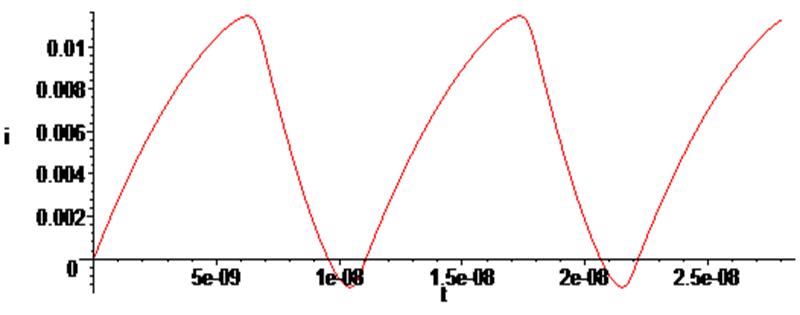
> odeplot(RsS,[t,i(t)],0.. 2.8*10^(-8), numpoints = 500);
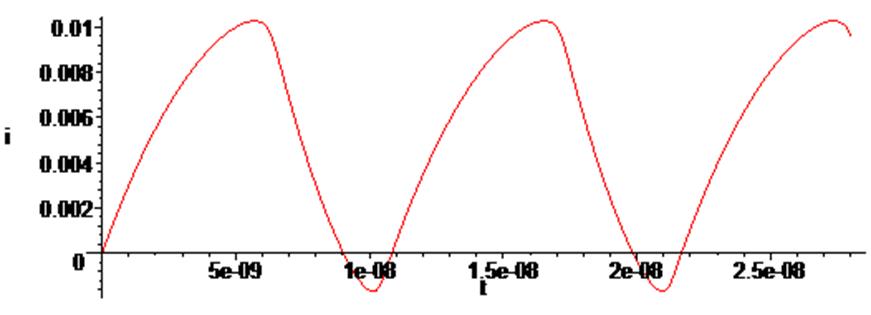
Таким образом, при постоянном входном сигнале мы опять наблюдаем в схеме незатухающие колебания, но их характеристики отличаются от предыдущего эксперимента.
Далее выполним моделирование при гармоническом входном сигнале и полиномиальной аппроксимирующей кривой.
> restart: with (plots):
Warning, the name changecoords has been redefined
> DUS1:=diff (i(t) , t ) = (E(t) - i(t)*R - U(t) ) / L , diff ( U(t) , t ) = ( i(t) - Idt (t) )/C ;
![]()
> Idt := (t) -> -.173436968680306253*U(t)^4+.633171796172742107*U(t)^3-.482681600586971571*U(t)^2+.986182570285672744e-1*U(t)+.338585492808390292e-2 ;
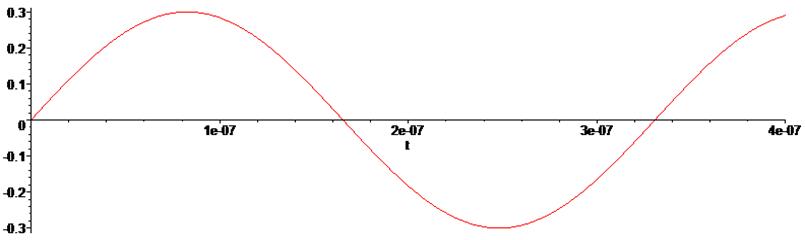
Задаём гармонический входной сигнал:
> E:=(t) -> 0.3*sin(19000000*t);
![]()
> plot(E(t), t=0 .. .4e-6);
> Nu := i(0) = 0 , U(0) = 0 :
> S := i(t) , U(t) :
> R := 10: C := 1E-11: L := 1E-7:
> RsS1 := dsolve ( { DUS1 , Nu } , {S} , type = numeric , maxfun=1000000 ) ;
![]()
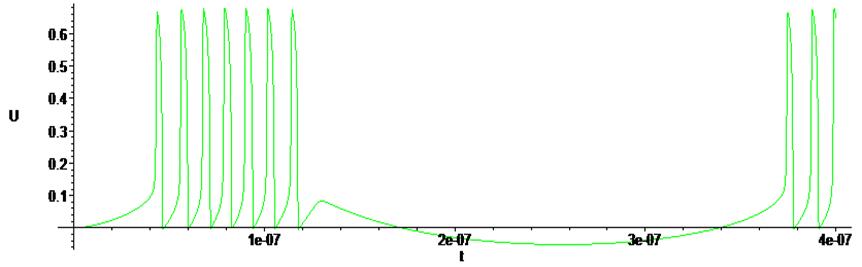
> odeplot(RsS1,[t,U(t)],0.. .4e-6, numpoints = 50000);
> odeplot(RsS1,[t,i(t)],0.. .4e-6, numpoints = 50000);
И наконец, выполним эксперимент с точно заданной ВАХ туннельного диода.
> restart: with (plots):
Warning, the name changecoords has been redefined
> DU:=diff (i(t) , t ) = (E(t) - i(t)*R - U(t) ) / L , diff ( U(t) , t ) = ( i(t) - Idt (t) )/C ;
![]()
> Idt := (t) -> .2854195919*U(t)*exp(-.1e2*U(t))+.115e-7*exp(20*U(t))-.115e-7 ;
![]()
> Nu := i(0) = 0 , U(0) = 0 :
> S := i(t) , U(t) :
> R := 10: C := 1E-11: L := 1E-7:
> E:=(t) -> 0.3: # Входной сигнал - постоянное напряжение 0.3В
> Rs := dsolve ( { DU , Nu } , {S} , type = numeric , maxfun = 1000000 ) ;
![]()
> odeplot(Rs,[t,U(t)],0.. 2.8*10^(-8), numpoints = 500);
> odeplot(Rs,[t,i(t)],0.. 2.8*10^(-8), numpoints = 500);
Сравним форму колебаний с результатами предыдущих экспериментов!
Далее, как и в предыдущих случаях, выполним моделирование при гармоническом входном сигнале.
> restart:
> with (plots):
Warning, the name changecoords has been redefined
> DU1:=diff (i(t) , t ) = (E(t) - i(t)*R - U(t) ) / L , diff ( U(t) , t ) = ( i(t) - Idt (t) )/C ;
![]()
> Idt := (t) -> .2854195919*U(t)*exp(-.1e2*U(t))+.115e-7*exp(20*U(t))-.115e-7 ;
![]()
> E:=(t) -> 0.3*sin(19000000*t):
> GE := plot(E(t), t=0 .. .4e-6):
> GE ;
> Nu := i(0) = 0 , U(0) = 0 :
> S := i(t) , U(t) :
> R := 10: C := 1E-11: L := 1E-7:
> Rs1 := dsolve ( { DU1 , Nu } , {S} , type = numeric , maxfun = 10000000 ) ;
![]()
> GU := odeplot(Rs1,[t,U(t)],0.. .4e-6, numpoints = 50000 , color = green ):
> GU ;
> plots [display] ( { GE, GU } ) ;
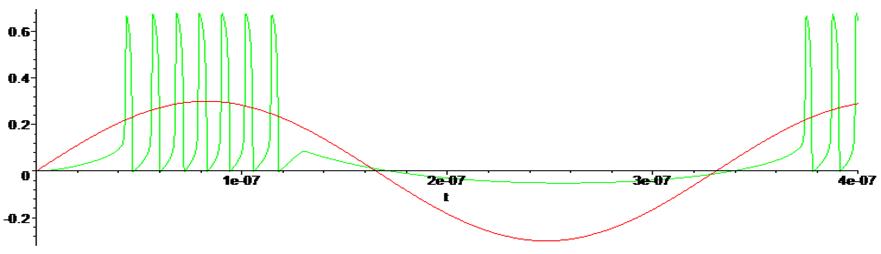
> odeplot(Rs1,[t,i(t)],0.. .4e-6, numpoints = 50000);
Меняя параметры цепи, например, амплитуду входного синусоидального напряжения, можно наблюдать интересное поведение графиков изменения напряжений и токов схемы, которые сложно предсказать без проведения моделирования.
Выводы: Таким образом, вид кривой, а значит и точность экспериментальных данных и полученных аппроксимирующих кривых существенно влияет на результаты моделирования, и, соответственно, проектирования электронных и, в общем случае, любых технических систем.
В наибольшей степени данное обстоятельство играет роль при моделировании и проектировании нелинейных систем.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.