
Лабораторная работа №11
Цель работы: Ознакомление с динамическими и частотными характеристиками систем автоматического управления (САУ) и получение навыков интерактивного исследования линейных динамических моделей.
1 Постановка задачи
В качестве объекта исследования выбраны линейные (линеаризованные) динамические стационарные системы управления с одним входом и одним выходом. При этом модель одномерной САУ задана в виде комплексной передаточной функции, записанной как отношение полиномов
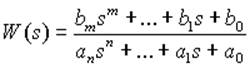 .
.
Необходимо:
![]() ,
, ![]() .
.
h(t), w(t).
L (w ).
W(iw ), w = [0, ¥ ].
6. Построить карту нулей и полюсов передаточной функции (при выполнении анализа в режиме LTIVIEW).
2 Сведения по работе с ППП Control System Toolbox
2.1 Для выполнения лабораторной работы используется пакет прикладных программ (ППП) Control System Toolbox (CST). ППП предназначен для работы с LTI-моделями (Linear Time Invariant Models – линейными инвариантными моделями) технических систем и систем управления.
MatLab позволяет выполнить требуемый анализ несколькими способами:
- в интерактивном режиме, задавая команды ППП в командном режиме из Command Window ;
- в программном режиме, организовав m-файл или пользовательскийGUI-интерфейс;
- используя графический интерфейс ППП CST, который называется LTI viewer;
- в режиме визуального моделирования пакета Simulink, создав файл моделирования Model.
Выбор способа анализа при решении прикладных инженерных задач моделирования определяется пользователем исходя из особенностей постановки задачи. При этом сложные и ответственные системы рекомендуется моделировать в различных режимах и сравнивать результаты моделирования.
В работе необходимо последовательно изучить и использовать все четыре указанные способа анализа.
В ППП Control System Toolbox имеется тип данных, определяющих динамическую систему в виде комплексной передаточной функции. Синтаксис команды tf, создающий в интерактивном режиме из Command Window LTI-систему с одним входом и одним выходом в виде передаточной функции:
>> W = tf([bm, …, b1, b0], [an, …, a1, a0])
bm, …, b1 – значения коэффициентов полинома В числителя передаточной функции,
an, …, a1 – значения коэффициентов полинома A знаменателя.
В результате в переменную W записывается LTI-система в виде передаточной функции. Коэффициенты можно разделять запятой или знаком пробела.
В окне вывода Workspace можно просмотреть созданную переменную.
Ниже показан пример создания двух LTI-систем с одинаковыми передаточными функциями, которые записаны в переменные W и H:
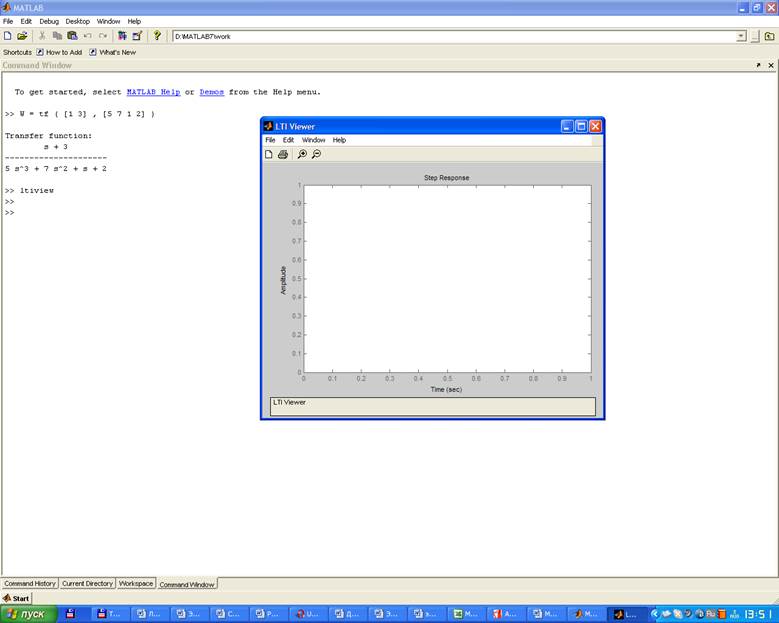
>> W = tf ( [1 3] , [5 7 1 2] )
Transfer function:
s + 3
---------------------
5 s^3 + 7 s^2 + s + 2
>> H = tf ( [1,3] , [5,7,1,2] )
Transfer function:
s + 3
---------------------
5 s^3 + 7 s^2 + s + 2
2.2 Интерактивный режим моделирования линейных динамических стационарных систем
Для выполнения работы необходимо использовать команды, приведенные в таблице 1.1.
Таблица 1.1. Основные команды ППП Control System Toolbox
|
Синтаксис |
Описание |
|
pole(<LTI-объект>) |
Вычисление полюсов передаточной функции |
|
zero(<LTI-объект>) |
Вычисление нулей передаточной функции |
|
step(<LTI-объект>) |
Построение графика переходной характеристики |
|
impulse(<LTI-объект>) |
Построение графика импульсной характеристики |
|
bode(<LTI-объект>) |
Построение логарифмических частотных характеристик (диаграммы Боде) |
|
nyquist(<LTI-объект>) |
Построение частотного годографа Найквиста |
Пример применения команды step:
>> step(W)
Здесь W – передаточная функция технического объекта, созданная по команде tf.
Для определения корней полиномов степени k, может применяться команда MATLAB
roots(P),
которая, в качестве аргумента P получает матрицу коэффициентов полинома [pk, …, p0].
Приведённые выше команды могут быть организованы в программный фрагмент, записаны в m-файл и затем запускаться на выполнение, как программа.
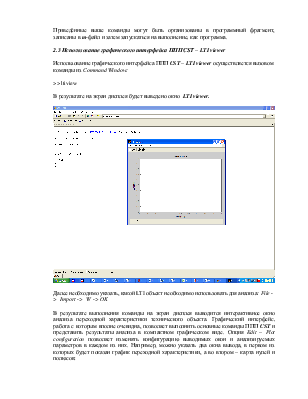
2.3 Использование графического интерфейса ППП CST – LTI viewer
Использование графического интерфейса ППП CST – LTI viewer осуществляется вызовом команды из Command Window:
>> ltiview
В результате на экран дисплея будет выведено окно LTI viewer.
Далее необходимо указать, какой LTI объект необходимо использовать для анализа: File -> Import -> W -> OK
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.