Наиболее общими являются динамические характеристики, которые учитывают изменение намагничивающей силы ЭМ в процессе его срабатывания за счет действия э.д.с. самоиндукции и движения, а также учитывают трение, демпфирование и инерцию подвижных частей. Однако получение динамических характеристик сопряжено с большой вычислительной работой. Поэтому в большинстве случаев, особенно когда не требуется точного определения времени срабатывания, ограничиваются рассмотрением статических характеристик. Последние получаются, если не учитывать влияния на электрическую цепь движущегося якоря ЭМ, а также не учитывать изменения потокосцепления по времени, т.е. считать, что ток в обмотке электромагнита неизменен.
Статическая тяговая характеристика – зависимость
тяговой силы ![]() от размера зазора d между опорными поверхностями
подвижного и неподвижного полюсов при неизменном значении тока I обмотки.
от размера зазора d между опорными поверхностями
подвижного и неподвижного полюсов при неизменном значении тока I обмотки.
Электромагнитная тяговая сила:

где Y - потокосцепление;
I - ток обмотки;
F - МДС обмотки;
Ф - приведенный магнитный поток.
F =![]() , Ф = Y/
, Ф = Y/![]() ,
,
где ![]() - число
витков обмотки.
- число
витков обмотки.
При рассмотрении магнитной системы ЭМП как цепи с распределенными параметрами, получается следующее выражение:
 ,
,
где Fk - падение магнитного напряжения на k-м изменяющемся при изменении d
зазоре (рабочем зазоре);
Lk - магнитная проводимость k-го рабочего зазора;
n - количество рабочих зазоров.
В некоторых случаях более удобным оказывается выражение:
где Ф k - магнитный поток через k-й зазор;
Rk - магнитное сопротивление k-го зазора.
Если расстояние между плоскими одинаковыми параллельными торцами двух полюсов намного меньше линейных размеров их поперечного сечения, тяговая сила этих полюсов может быть определена так:
где ![]() -
магнитный поток через торцы полюсов;
-
магнитный поток через торцы полюсов;
![]() -
магнитная индукция в зазоре (между торцами полюсов);
-
магнитная индукция в зазоре (между торцами полюсов);
![]() -
магнитная постоянная (
-
магнитная постоянная (![]() = 4p*10-7 Гн/м);
= 4p*10-7 Гн/м);
S - площадь торцов полюсов.
Форма тяговой характеристики зависит от конструкции и формы магнитопровода и от МДС обмотки. Наиболее сильное влияние на вид тяговой характеристики оказывает форма опорных поверхностей рабочего зазора (зазора между неподвижной и подвижной частями магнитопровода).
|
|
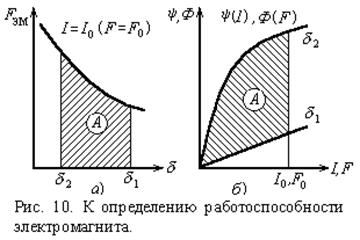
Площадь под тяговой
характеристикой при токе I0 (МДС F0)
определяет полезную механическую работу (работоспособность) A (рис. 10,
а). Работоспособность ЭМП также определяется через характеристики
потокосцепления Y (I) или
приведенного магнитного потока Ф(F), соответствующие начальному ![]() и конечному
и конечному ![]() зазорам
(рис. 10, б). В процессе срабатывания ЭМП преодолевает противодействующие
усилия механизма или электрического аппарата. При начальном положении якоря
тяговое усилие ЭМП возрастает с ростом тока его обмотки. Ток, при котором
тяговая сила становится равной противодействующей (вызывает начало движения
якоря) называется током трогания Iтр. Значение Iтр характеризует
электромагнитный механизм, то есть ЭМП совместно с механизмом, приводимым им в
действие.
зазорам
(рис. 10, б). В процессе срабатывания ЭМП преодолевает противодействующие
усилия механизма или электрического аппарата. При начальном положении якоря
тяговое усилие ЭМП возрастает с ростом тока его обмотки. Ток, при котором
тяговая сила становится равной противодействующей (вызывает начало движения
якоря) называется током трогания Iтр. Значение Iтр характеризует
электромагнитный механизм, то есть ЭМП совместно с механизмом, приводимым им в
действие.
Пока Iу< Iтр якорь ЭМП не приходит в движение. При этом магнитопровод ЭМП ненасыщен, т.к. воздушный зазор достаточно велик. Поэтому переходный процесс изменения тока i близок к экспоненциальному с постоянной времени T0 (кривая 1 на рис. 11).
При Iу > Iтр зависимость имеет также характер, близкий к экспоненциальному, с постоянной времени T0. При заторможенном якоре этот характер сохраняется до установившегося состояния (пунктирная кривая на рис. 11). Если же якорь не заторможен, то в момент времени трогания tтр (i=Iтр) якорь начинает двигаться (зазор уменьшается). Поскольку при этом индуктивность L обмотки увеличивается, то в ней появляется противо-ЭДС движения i(dL/dt), и ток начинает уменьшаться относительно значений при неподвижном якоре. Этот процесс продолжается до момента срабатывания tсраб= tтр+ tдв (где tдв - время движения якоря), когда якорь ударяется о сердечник. Сначала ток растет сравнительно медленно (T1>> T0), т.к. при малых токах и притянутом якоре индуктивность обмотки велика. При увеличении тока магнитопровод насыщается и дифференциальная индуктивность уменьшается, что приводит к увеличению скорости нарастания тока (T2< T1). Величины T1 и T2 характеризуют инерционность обмотки электромагнитной системы.
|
|
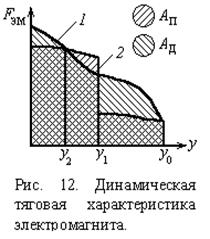
Динамическая тяговая характеристика - зависимость тягового усилия от зазора в период срабатывания ЭМП при заданной характеристике противодействующих сил (рис. 12). Эти зависимости характеризуют электромагнитный механизм, т.к. форма кривых определяется не только конструкцией ЭМП, но и свойствами электромагнитного механизма.
|
|
Площадь под
характеристикой противодействующих сил равна полезной механической работе
![]() , совершенной ЭМ. Площадь под динамической тяговой
характеристикой - динамическая работоспособность Aд. Значения
, совершенной ЭМ. Площадь под динамической тяговой
характеристикой - динамическая работоспособность Aд. Значения
![]() и Aд связаны соотношением:
и Aд связаны соотношением:
где m - масса подвижных частей;
Vk - скорость якоря в момент его удара о неподвижную часть магнитопровода.
Таким образом, динамическая работоспособность ЭМ превосходит полезную механическую работу на значение кинетической энергии подвижных частей в момент удара якоря о неподвижную часть магнитопровода.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.