Электрические преобразователи тока (напряжения)
в усилие (момент)
Наибольшее распространение нашли магнитоэлектрические и ферродинамические преобразователи. По роду движения, совершаемого в процессе работы их подразделяют на преобразователи поступательного и вращательного движения.
В основе работы приводов с магнитоэлектрическими преобразователями лежит использование сил, возникающих в результате взаимодействия магнитного поля постоянного магнита и проводника с током, находящегося в этом поле.
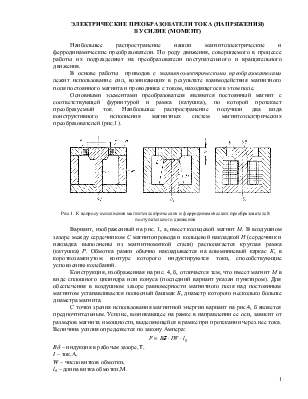
Основными элементами преобразователя являются постоянный магнит с соответствующей фурнитурой и рамка (катушка), по которой протекает преобразуемый ток. Наибольшее распространение получили два вида конструктивного исполнения магнитных систем магнитоэлектрических преобразователей (рис.1).
|
Рис.1. К вопросу исполнения магнитоэлектрических и ферродинамических преобразователей поступательного движения |
Вариант, изображенный на рис. 1, а, имеет кольцевой магнит М. В воздушном зазоре между сердечником С магнитопровода и кольцевой накладкой Н (сердечник и накладка выполнены из магнитномягкой стали) располагается круглая рамка (катушка) P. Обмотка рамки обычно накладывается на алюминиевый каркас К, в короткозамкнутом контуре которого индуктируются токи, способствующие успокоению колебаний.
Конструкция, изображенная на рис. 4, б, отличается тем, что имеет магнит М в виде сплошного цилиндра или конуса (последний вариант указан пунктиром). Для обеспечения в воздушном зазоре равномерности магнитного поля над постоянным магнитом устанавливается полюсный башмак Б, диаметр которого несколько больше диаметра магнита.
С точки зрения использования магнитной энергии вариант на рис.4, б является предпочтительным. Усилие, возникающее на рамке в направлении ее оси, зависит от размеров магнита и мощности, выделяющейся в рамке при протекании через нее тока. Величина усилия определяется по закону Ампера:
![]()
Bd – индукция в рабочем зазоре,Т,
I – ток,А,
W – число витков обмотки,
l0 – длина витка обмотки,М.
О величине усилий, развиваемых такими преобразователями можно судить исходя из следующих реальных данных:
Bd £ 0.3 Тл;
Iw £ 1500 A;
l0 £ 0.314 м.
С достаточной степенью точности можно считать магнитоэлектрический привод звеном нулевого порядка. Основанием для такого утверждения служит тот общеизвестный факт, что магнитоэлектрические устройства подобного типа практически без искажений пропускают частоты до нескольких килогерц.
Основное отличие ферродинамических преобразователей заключается в том, что магнитное поле в рабочем зазоре возбуждается электромагнитом, а не постоянным магнитом, как это имело место в магнитоэлектрических преобразователях.
В схеме ферродинамического преобразователя, изображенной на рис.4, в, соответственно изображен сердечник С из магнитномягкого железа (часто сердечник выполняется шихтованным) и обмотка возбуждения OВ.
Основным препятствием на пути использования ферродинамических преобразователей является необходимость в стабилизированном источнике тщательно отфильтрованного постоянного напряжения.
Сравнивая магнитоэлектрический и ферродинамические преобразователи с точки зрения сложности конструкции и технологии, можно отметить, что они примерно равноценны. При изготовлении магнитоэлектрических преобразователей необходимо использование достаточно сложной технологии производства постоянных магнитов. В конструкцию же ферродинамических преобразователей входит обмотка возбуждения, которая отсутствует у магнитоэлектрических преобразователей.
Рассматривая эксплуатационные свойства ферродинамических преобразователей (опять-таки сравнительно со свойствами магнитоэлектрических), можно заметить, что они практически не чувствительны к вибрациям и их характеристики не зависят от времени. В динамическом смысле ферродинамические преобразователи напряжения постоянного тока в усилие подобны магнитоэлектрическим преобразователям, т. е. их передаточная функция также имеет вид:
![]()
Из рассмотрения принципа действия ферродинамических преобразователей видно, что усилие на рамке пропорционально произведению токов подмагничивания и преобразуемого.
При последовательном соединении рамки и обмотки возбуждения и протекании через эту цепь преобразуемого тока усилие на рамке окажется пропорциональным квадрату этого тока. В некоторых случаях получение такой зависимости может представлять самостоятельный интерес.
В преобразователях электромагнитного типа усилие возникает в результате взаимодействия магнитного поля, возбуждаемого преобразуемым током, с подвижным сердечником из ферромагнитного материала. Для создания равномерного магнитного поля и его концентрации в рабочем воздушном зазоре обмотка преобразователя снабжается магнитопроводом соответствующей формы и конструкции. Отличительной особенностью электромагнитных преобразователей является наличие зависимости не только от преобразуемого тока, но и от положения подвижного сердечника, следствием чего является нелинейность его механической характеристики. Это в некоторой мере является недостатком такого рода преобразователей. Но по сравнению с рассмотренными выше преобразователями электромагнитные преобразователи являются более энергоемкими.
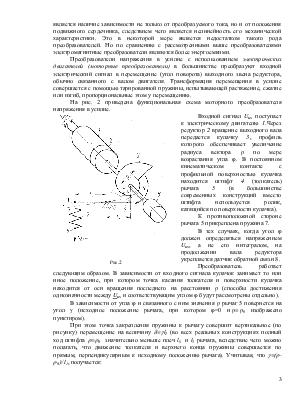
Преобразователи напряжения в усилие с использованием электрических двигателей (моторные преобразователи) в большинстве преобразуют входной электрический сигнал в перемещение (угол поворота) выходного звена редуктора, обычно связанного с валом двигателя. Трансформация перемещения в усилие совершается с помощью тарированной пружины, испытывающей растяжение, сжатие или изгиб, пропорциональные этом у перемещению.
На рис. 2 приведена функциональная схема моторного преобразователя напряжения в усилие.
|
Рис.2 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.