








Вопрос 1 (Показатели качества переходного процесса)
Рассмотрим одноканальную автоматическую систему стабилизации, для которой входное воздействие является постоянной величиной (v = const), а цель регулирования состоит в организации свойства:
lim y(t) = v при ![]() . (5.3)
. (5.3)
 Основными показателями качества таких систем
являются характеристики переходного процесса.
Основными показателями качества таких систем
являются характеристики переходного процесса.
1. Ошибка регулирования
Для оценки точности используется величина ошибки
![]() ,
(5.4)
,
(5.4)
которая с течением времени стремится к некоторому постоянному значению, называемому статической ошибкой:
![]() .
(5.5)
.
(5.5)
При известной структурной схеме системы ошибку можно определить в операторной форме с помощью структурных преобразований,
![]() (5.6)
(5.6)
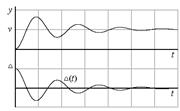 Рис. 5.2. Изменение ошибки во времени
Рис. 5.2. Изменение ошибки во времени
В этом случае статический режим характеризуется тем, что p=0, а статическая ошибка находится по выражению
![]() (5.7)
(5.7)
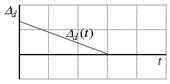
Динамической ошибкой будем называть величину
![]() ,
(5.8)
,
(5.8)
причем ![]() .
.
Ошибка (статическая ошибка) является одной из основных количественных характеристик динамики системы.
2. Быстродействие
В качестве оценок быстродействия можно использовать различные величины, причем все они определяют время от начала процесса до какого-либо характерного значения. С этой целью рассмотрим переходную характеристику системы h(t).
Оценками быстродействия могут служить:
·
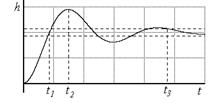
![]() - время от начала процесса до первого
момента достижения установившегося значения
- время от начала процесса до первого
момента достижения установившегося значения ![]() (справедливо
только для колебательных процессов);
(справедливо
только для колебательных процессов);
·
![]() - время достижения первого максимума (также
возможно только для колебательных процессов);
- время достижения первого максимума (также
возможно только для колебательных процессов);
·
![]() - время от начала процесса до момента
достижения установившегося значения
- время от начала процесса до момента
достижения установившегося значения ![]() со статической ошибкой
со статической ошибкой ![]() не более заданной. На практике в качестве
оценки быстродействия чаще всего используют величину
не более заданной. На практике в качестве
оценки быстродействия чаще всего используют величину ![]() ,
которую обычно обозначают как tn и называют временем переходного
процесса.
,
которую обычно обозначают как tn и называют временем переходного
процесса.
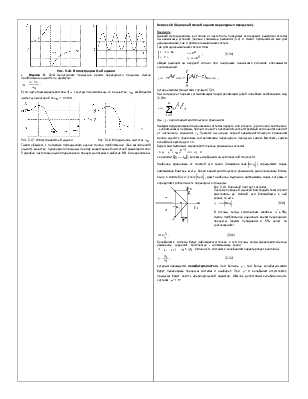
3. Перерегулирование
Эта количественная оценка характеризует
колебательные свойства системы обозначается буквой ![]() и
определяется в процентах относительно установившегося значения по выражению
и
определяется в процентах относительно установившегося значения по выражению
![]() . (5.9)
. (5.9)
Чем больше перерегулирование ![]() , тем более система склонна к колебаниям.
, тем более система склонна к колебаниям.
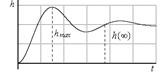 Риc. 5.4. Иллюстрация оценки
перерегулирования
Риc. 5.4. Иллюстрация оценки
перерегулирования4. Интегральные оценки
Интегральные оценки представляют собой обобщенные показатели качества переходного процесса. Обычно для их определения используют динамическую ошибку.
В качестве интегральной оценки можно использовать следующие величины:
1) , (5.10)
, (5.10)
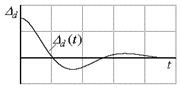 Риc. 5.5. Динамическая ошибка системы
Риc. 5.5. Динамическая ошибка системы
которая дает надежные результаты только в случае монотонного переходного процесса.
2)
 (5.11)
(5.11)
характеризует площадь под кривой ![]() на рис.5.5.
на рис.5.5.
3)  .
(5.12)
.
(5.12)
Наиболее удобной из приведенных является
интегральная оценка ![]() , которая сравнительно просто
вычисляется и применяется как для монотонного, так и для колебательного
процесса. Она характеризует также затраты энергии на совершение переходного
процесса. Идеальный переходный процесс (без лишних потерь энергии) представлен
на рис. 5.6.
, которая сравнительно просто
вычисляется и применяется как для монотонного, так и для колебательного
процесса. Она характеризует также затраты энергии на совершение переходного
процесса. Идеальный переходный процесс (без лишних потерь энергии) представлен
на рис. 5.6.
В общем виде интегральная оценка качества переходного процесса записывается следующим образом:
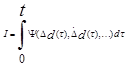 . (5.13)
. (5.13)Применение конкретной интегральной оценки зависит от вида переходного процесса и требований, предъявляемых к системе.
Вопрос 2 (Статистические системы)
Статическойбудем называть такую
систему управления, функционирование которой возможно только при наличии
статической ошибки ![]() .
.
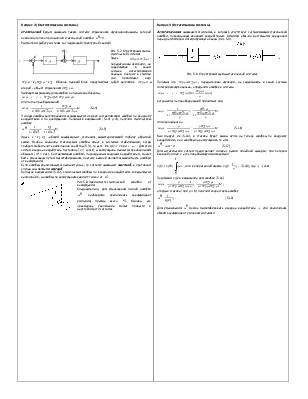
Рассмотрим работу системы со следующей структурной схемой:
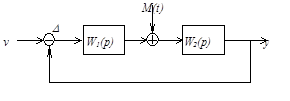
Рис. 5.7. Структурная схема статической системы
Здесь ![]() -
передаточные функции, не содержащие в своем составе интегрирующих звеньев,
поэтому в статике они принимают вид:
-
передаточные функции, не содержащие в своем составе интегрирующих звеньев,
поэтому в статике они принимают вид: ![]() . Обычно первый блок
представляет собой регулятор
. Обычно первый блок
представляет собой регулятор ![]() а второй - объект
управления
а второй - объект
управления![]()
Запишем выражение для ошибки в операторной форме,
![]()
или после преобразований
![]() (5.14)
(5.14)
Полная ошибка регулирования складывается из двух составляющих: ошибки по входному воздействию и по возмущению. Полагая в выражении (5.14) p=0, получим статическую ошибку
![]() (5.15)
(5.15)
Здесь ![]() -общий
коэффициент усиления, характеризующий глубину обратной
-общий
коэффициент усиления, характеризующий глубину обратной
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.