







Первый из них – FromFile – предназначается для ввода в модель данных, хранящихся в MAT – файле. Структура данных в этом файле есть многомерный массив с переменным числом строк, которое определяется числом регистрируемых переменных.
Второй – Fromworkspace – обеспечивает ввод в модель данных непосредственно из рабочей области MATLAB. Формат данных, считываемых из рабочей области, аналогичен формату Mat – файла, за исключением того, что значения времени и соответствующие им значения параметров расположены не по строкам, а по столбцам.
3.2 Раздел Sinks
В этом разделе расположены приемники сигналов. Это устройства, куда можно вывести данные, полученные в результате моделирования.
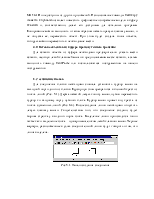
Принцип действия приемника XYGraph аналогичен работе двухкоординатного осциллографа. Блок Scope позволяет в процессе моделирования наблюдать за динамикой изменения интересующих исследователя характеристик системы. Элемент Display позволяет в окошке отобразить текущее значение контролируемой величины. Приемник Stopsimulation позволяет остановить процесс моделирования программно при срабатывании некоторого условия. И, пожалуй, необходимо отметить еще один блок, который довольно часто используется при обработке результатов экспериментов. Это блок Toworkspace, который предназначен для сохранения данных, полученных в процессе моделирования, в рабочей области MATLAB. Данные сохраняются в виде матрицы, структура которой отличается от структуры данных в том же Mat – файле тем, что значения сохраняемых параметров расположены по строкам, а не по столбцам. Сохраняемые данные могут быть записаны в один из форматов – Matrix – в виде матрицы, Structure – данные сохраняются в виде структуры, содержащей 3 поля: time – вектор значений модельного времени, signals – массив значений наблюдаемых параметров, blockname – имя блока To workspace, используемое в модели. При выборе формата сохранения данных нужно учитывать то, каким образом эти данные будут впоследствии использоваться. Например, если они будут загружаться в модель с помощью блока From file, то обязательно следует сохранить и вектор значений модельного времени.
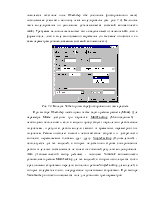
3.3 Раздел Continuous
Данный раздел содержит блоки, которые условно можно разделить на две группы:
предназначенные, собственно, для описания непрерывных систем и общего назначения, которые могут использоваться в модели любого типа.
К первой группе относятся TransferFcn – передаточная функция, State - space – блок формирования состояния системы, Zero – Pole – блок, реализующий передаточную функцию, описанную с помощью оператора Лапласа, Derivative – блок вычисления производной входного сигнала по времени. Ко второй группе относятся четыре блока – Integrator – сумматор непрерывного времени, Memory– блок задержки входного сигнала на один шаг модельного времени, Transportdelay– реализует произвольную задержку входного сигнала, Variabletransportdelay –блок изменяемой задержки входного сигнала.
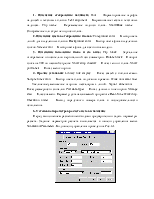
3.4 Раздел Discrete
Здесь находятся элементы для построения дискретных систем. Элемент Unitdelay обеспечивает задержку входного сигнала на заданное число периодов. В его окне параметров можно задавать начальное состояние и шаг дискретизации
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.